Excertos do catálogo

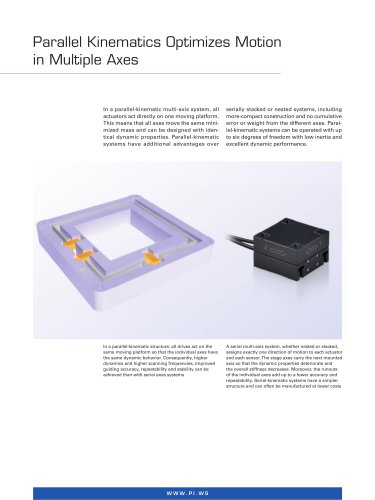
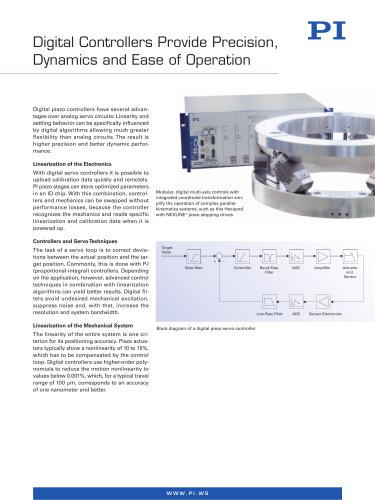
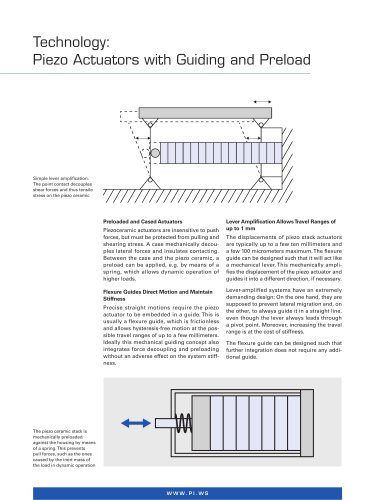
Kinematics of Multi-Axis Tip/Tilt Systems Piezo tip/tilt mirror systems from PI are based on parallel kinematics with a single movable platform for all directions of motion. The systems achieve a higher linearity than can be attained by switching two single-axis systems in succession, as is the case with galvanoscanners, for example, and therefore, are very compact. Horse head nebula (Photo: Brian Lula) The tilt angle and the travel in Z are calculated using the following formulas: A, B, C is the linear displacement of the relevant actuators. Arrangement of the actuators of a tripod piezo drive They allow for an optical beam deflection up to 100 mrad, extremely short response times from milliseconds to microseconds and resolutions down to nanoradians. The platform is driven by two pairs of piezo actuators located in 90° angles to one another. Four actuators are controlled differentially in pairs, depending on the tilt direction. The tilt axes θX and θY are arranged orthogonally so that a coordinate transformation is not necessary. PI offers a large range from compact systems for laser beam steering up to large units used for astronomy. This concludes in an excellent stability in linear and angular positioning for a wide temperature range. Tip/Tilt System with Tripod Piezo Drive The platform is driven by three piezo actuators that are located in 120° angles to one another. By means of coordinate transformation, the motion can be split among the different actuators. Just as the tripod, the differential version guarantees an optimum angular stability over a large temperature range. For position controlled versions, the differential evaluation of two sensors per axis provides an improved linearity and resolution. In addition to tilting, the platform may also be used linearly in Z direction, which is important, for example, for correcting optical path lengths (phase shifters). Tip/Tilt System with Differential Piezo Drive (Tetrapod) Piezo-actuated tip/tilt mirrors and platforms are suitable both for highly dynamic operation, such as tracking, scanning, image stabilization, elimination of drift and vibration, and for static positioning of optical systems and samples. Principle of a tilt system with differential piez
Abrir o catálogo na página 1
The maximum operating frequency of a piezo tip/tilt system strongly depends on its mechanical resonant frequency. The properties of amplifier, controller and sensor are also important. To estimate the effective resonant frequency of the system - a combination of platform and mirror - it is necessary to calculate the moment of inertia of the mirror substrate first. Moment of inertia of a rotationally symmetric mirror: The resonant frequency of the system is calculated with resonant frequency of the platform (see technical data) and moment of inertia of the mirror substrate using the...
Abrir o catálogo na página 2
Headquarters GERMANY_ © Physik Instrumente (PI) GmbH & Co. KG All contents, including texts, graphics, data etc., as well as their layout, are subject to copyright and other protective laws. Any copying, modification or redistribution in whole or in parts is subject to a written permission of PI. Although the information in this document has been compiled with the greatest care, errors cannot be ruled out completely. Therefore, we cannot guarantee for the information being complete, correct and up to date. Illustrations may differ from the original and are not binding. PI reserves the right...
Abrir o catálogo na página 3Todos os catálogos e folhetos técnicos Physik Instrumente
-
 A-143
A-1435 Páginas
-
 A-811.CE
A-811.CE3 Páginas
-
 G-902.RxI
G-902.RxI5 Páginas
-
 P-405
P-4054 Páginas
-
 PRYY
PRYY7 Páginas
-
 A-523
A-5235 Páginas
-
 M-110 • M-111 • M-112 V6
M-110 • M-111 • M-112 V64 Páginas
-
 L-812
L-81218 Páginas
-
 RS-40 V7
RS-40 V74 Páginas
-
 A-68x
A-68x4 Páginas
-
 G-901
G-9019 Páginas
-
 G-910.RC02
G-910.RC026 Páginas
-
 F-712.IRP
F-712.IRP6 Páginas
-
 G-910.RC01 • RC03
G-910.RC01 • RC034 Páginas
-
 C-663.12
C-663.123 Páginas
-
 C-887.53x
C-887.53x5 Páginas
-
 Piezoelectric Discs
Piezoelectric Discs7 Páginas
-
 L-402
L-4025 Páginas
-
 P-840
P-8404 Páginas
-
 M-238
M-2385 Páginas
-
 L-220
L-2205 Páginas
-
 P-725
P-7259 Páginas
-
 C-413
C-4133 Páginas
-
 P-518 • P-528 • P-558
P-518 • P-528 • P-5586 Páginas
-
 PL112 – PL140
PL112 – PL1404 Páginas
-
 U-628
U-6283 Páginas
-
 P-545.3D8S
P-545.3D8S5 Páginas
-
 P-611.XZ • P-611.2
P-611.XZ • P-611.24 Páginas
-
 P-541.2 • P-542.2
P-541.2 • P-542.25 Páginas
-
 Leading in Precision Positioning
Leading in Precision Positioning12 Páginas
-
 PI Piezoelectric Ceramic Products
PI Piezoelectric Ceramic Products44 Páginas
-
 Engineered Systems
Engineered Systems8 Páginas
-
 Precision Motion Control
Precision Motion Control4 Páginas
-
 PiezoWalk® Piezo Stepping Drives
PiezoWalk® Piezo Stepping Drives7 Páginas
-
 Drivetrain Elements
Drivetrain Elements4 Páginas
-
 Motors and Drives
Motors and Drives3 Páginas
-
 Positioning with Piezo Systems
Positioning with Piezo Systems248 Páginas
-
 Precision Positioning and Motion Control
Precision Positioning and Motion Control297 Páginas
-
 Hexapod Positioning Systems
Hexapod Positioning Systems133 Páginas
-
 PIRest Actuators - P-131
PIRest Actuators - P-1314 Páginas
-
 High-Load Linear Stage - L-417
High-Load Linear Stage - L-41712 Páginas
-
 6-Axis Miniature Hexapod - H-811.F2
6-Axis Miniature Hexapod - H-811.F24 Páginas
-
 PICA piezo amplifier module
PICA piezo amplifier module3 Páginas
-
 V-412 • V-418 • V-423
V-412 • V-418 • V-4232 Páginas
-
 S-335 Fast Tip/Tilt Platform
S-335 Fast Tip/Tilt Platform3 Páginas
-
 P-616 NanoCube® Nanopositioner
P-616 NanoCube® Nanopositioner4 Páginas
-
 Q-Motion® SpaceFAB
Q-Motion® SpaceFAB4 Páginas
-
 A-131
A-1315 Páginas
-
 P-892.xx Sensor Extension Cable
P-892.xx Sensor Extension Cable3 Páginas
-
 P-893 • P-894 LEMO / BNC Adapter
P-893 • P-894 LEMO / BNC Adapter2 Páginas
-
 P-890 Cable LEMO / Solderable End
P-890 Cable LEMO / Solderable End2 Páginas
-
 d-891
d-8911 Páginas
-
 PI Datasheet V-275
PI Datasheet V-2755 Páginas
-
 PI Datasheet V-273
PI Datasheet V-2735 Páginas
-
 PI Datasheet V-522 • V-524 • V-528
PI Datasheet V-522 • V-524 • V-5287 Páginas
-
 PI Datasheet VT-80
PI Datasheet VT-803 Páginas
-
 A-65x
A-65x4 Páginas
-
 A-60x.MTT
A-60x.MTT1 Páginas
-
 A-80x
A-80x3 Páginas
-
 A-322
A-3223 Páginas
-
 A-110
A-1103 Páginas
-
 A-141
A-1413 Páginas
-
 A-123
A-1235 Páginas
-
 A-121
A-1215 Páginas
-
 DT-34
DT-344 Páginas
-
 D-015 • D-050 • D-100
D-015 • D-050 • D-1005 Páginas
-
 A-10x
A-10x3 Páginas
-
 Q-Motion Miniature Positioning Stages
Q-Motion Miniature Positioning Stages32 Páginas
-
 New Products 2015
New Products 201548 Páginas
-
 PI Products for Microscopy
PI Products for Microscopy36 Páginas
-
 PI Electron Microscopy
PI Electron Microscopy16 Páginas
-
 Piezo Motors and Stages
Piezo Motors and Stages48 Páginas
-
 Piezo Mike Linear Actuators
Piezo Mike Linear Actuators16 Páginas
-
 PI Product Overview
PI Product Overview34 Páginas
-
 PIMag® Magnetic Direct Drives
PIMag® Magnetic Direct Drives6 Páginas
-
 PILine® Ultrasonic Piezomotors
PILine® Ultrasonic Piezomotors20 Páginas
-
 Catalog: PI Piezo Nano Positioning 2014/2015
Catalog: PI Piezo Nano Positioning 2014/2015269 Páginas
-
 Piezoelectric Actuators
Piezoelectric Actuators74 Páginas
-
 Hexapods 6-Axis Stages
Hexapods 6-Axis Stages56 Páginas
-
 Piezo Amplifiers & Controllers
Piezo Amplifiers & Controllers44 Páginas