Excertos do catálogo

TECHNICAL NOTE Motion in 3-D: Newport Hexapod Coordinate Systems Controlling Motion in 3-D space requires a user to have a clear understanding of the relationship between end effector positions and positions of devices under test. Regardless of whether it is an industrial positioning platform used in machinery, using a cutting tool and a work piece, or an electro-optical beam steering setup for advanced research in a diffractometry using a laser beam and a sample, precise readings and controls of both end effectors and devices are of key importance. Due to the complexity of motion in 3-D, multi-axis systems can present many issues without careful design and considerations. Newport Hexapods provide innovative user-definable coordinate systems to answer this challenge, leading the way of user-friendly multi-axis positioning platforms available on the market. This tech note illustrates the three user-definable coordinate systems and helps with integration and configuration of the Hexapods in experimental setups or manufacturing process, thus to help maximize the benefits of using the line of Newport’s Hexapod products. To uniquely represent the position of a moving platform in three-dimensional space, one must specify its spatial location and angular orientation with three linear and three rotational coordinate values. The Newport HXP series of Hexapods uses a Cartesian coordinate system for translation and the Bryant angles for rotation, which are frequently used in robotics and aviation. (See Figure 1) A position (X Y Z U V W) represents a XYZ location of the center point of the platform in a 3-D space in right-handed Cartesian coordinate system as well as orientation in roll, pitch and yaw (U V W, TaitBryan angles definition). Figure 1: Setup Configuration for Optical Quality Testing with Gimbal To understand how the position (X Y Z U V W) is reached in the Hexapod coordinate systems, consider a move defined by position (X Y Z U V W) starting from the position (0 0 0 0 0 0). The Tool coordinate system is set to the position (X Y Z) in the Work coordinate system. Then, it rotates about the z axis of the Tool coordinate system (W), rotates about the new y axis of the Tool coordinate system (V) and rotates about the new x axis of the Tool coordinate system (U). All rotations are made clockwise for positive rotations. When positioning commands are given in Cartesian coordinates and Bryant angles, they are transformed by the Newport HXP controller to the specific positions and velocities for each of the six Hexapod actuators before execution. All individual positions for the six actuators are taken as a set to define a unique position (location and orientation) of the Hexapod in the coordinate system. The transformation of coordinate to the actuator lengths is fully transparent. Understanding the Tool, Work and Base coordinate systems How does the Hexapod uniquely determine the position (location and orientation in X Y Z U V W)? As we are familiar with scalar fields in mathematics, a point is a sufficient geometric element to specify spatial positions (X Y Z) in a 3-D space. However, this representation is insufficient to identify directions associated with angular positions (U V W). It is however
Abrir o catálogo na página 1
TECHNICAL NOTE Motion in 3-D: Newport Hexapod Coordinate Systems 0), the upper surface of the top plate is close to mid travel for the HXP50 and the HXP1000, and it is close to the lower extreme position for the HXP100); 3) The XY plane of the coordinate system is parallel to the base plate; 4) The W-axis (Yaw orientation) matches the orientation defined in the Hexapod drawing. (The motor cables point in the positive X-axis direction of the World coordinate system.) The World Coordinate System is an absolute fixed reference to the outside world. It is defined such that, in the default...
Abrir o catálogo na página 2
TECHNICAL NOTE Motion in 3-D: Newport Hexapod Coordinate Systems Why is the Base coordinate system defined relative to the World coordinate system, instead of the Work coordinate system? By referencing the World coordinate system, it is possible to take into account any change in the position of the Hexapod without affecting the motion commands of the Tool in the Work coordinate system. A good example is a Hexapod mounted on a moving platform at the center of a multi-axis goniometer in a diffractometry application. (Figure 4) When the Hexapod itself is rotated or moved to a different...
Abrir o catálogo na página 3
Motion in 3-D: Newport Hexapod Coordinate Systems axes relative to the beam from the starting position, allowing the material processing on the surface of the sample, as an example. This two pivot concept also applies to the inspection, metrology or traditional machining processes. Typical applications for the Hexapod include optical alignment and calibration, biomedical engineering and surgical robotics, satellite and telescope positioning, sensor metrology and calibration, and semiconductor test and metrology. For additional information, please visit the Newport HXP series Hexapod webpage...
Abrir o catálogo na página 4Todos os catálogos e folhetos técnicos MICRO-CONTROLE / Spectra-Physics
-
 Precision Motion Control
Precision Motion Control27 Páginas
-
 Motorized Linear Stage Selection Guide
Motorized Linear Stage Selection Guide43 Páginas
-
 OPTICAL FIBER ALIGNMENT
OPTICAL FIBER ALIGNMENT6 Páginas
-
 VGEN/SPFL Component Selection Guide
VGEN/SPFL Component Selection Guide4 Páginas
-
 Wavelength Tunable Faraday Isolators
Wavelength Tunable Faraday Isolators2 Páginas
-
 SA2_90028936F
SA2_90028936F1 Páginas
-
 10BPF10-370_ROHS
10BPF10-370_ROHS1 Páginas
-
 10BPF10-320_ROHS
10BPF10-320_ROHS1 Páginas
-
 10BPF10-310
10BPF10-3101 Páginas
-
 M-401
M-4011 Páginas
-
 Tunable Diode Lasers
Tunable Diode Lasers16 Páginas
-
 Custom Component Solutions
Custom Component Solutions6 Páginas
-
 New Focus Tunable Diode Lasers Brochure
New Focus Tunable Diode Lasers Brochure28 Páginas
-
 Vision IsoStation Brochure
Vision IsoStation Brochure5 Páginas
-
 Nanopositioning Solutions
Nanopositioning Solutions55 Páginas
-
 newport ressource
newport ressource1640 Páginas
-
 Motion PL30
Motion PL3024 Páginas
-
 CONEX-AG-LS25-27P
CONEX-AG-LS25-27P2 Páginas
-
 Nanopositioners
Nanopositioners40 Páginas
-
 Prisms and retroreflectors
Prisms and retroreflectors9 Páginas
-
 Beamsplitters
Beamsplitters34 Páginas
-
 Spherical and aspherical lenses
Spherical and aspherical lenses35 Páginas
-
 Optrical mirror
Optrical mirror33 Páginas
-
 Electronic Autocollimator CONEX-LDS
Electronic Autocollimator CONEX-LDS10 Páginas
-
 Systems Solutions brochure
Systems Solutions brochure6 Páginas
-
 Fast Steering Mirrors
Fast Steering Mirrors4 Páginas
-
 Optical Delay Line Kit
Optical Delay Line Kit1 Páginas
-
 Long Scan Autocorrelator
Long Scan Autocorrelator1 Páginas
-
 I-V Test Station
I-V Test Station2 Páginas
-
 Projects in Optics
Projects in Optics2 Páginas
-
 Projects in Interferometry
Projects in Interferometry2 Páginas
-
 Azimuth / Elevation Gimbals
Azimuth / Elevation Gimbals2 Páginas
-
 Air-Bearing System
Air-Bearing System2 Páginas
-
 Large Motorized Mirror Mounts
Large Motorized Mirror Mounts2 Páginas
-
 X-Ray Diffractometer
X-Ray Diffractometer2 Páginas
-
 Motion System
Motion System2 Páginas
-
 Pick & Place Machine
Pick & Place Machine2 Páginas
-
 Single Axis Air-Bearing System
Single Axis Air-Bearing System2 Páginas
-
 Metrology Positioning System
Metrology Positioning System2 Páginas
-
 SlimLine™ Workstation Table Systems
SlimLine™ Workstation Table Systems2 Páginas
-
 Ergonomic Workstation Accessories
Ergonomic Workstation Accessories4 Páginas
-
 SG Series Scientific Grade Breadboards
SG Series Scientific Grade Breadboards2 Páginas
-
 IG Series Industrial Grade Breadboards
IG Series Industrial Grade Breadboards2 Páginas
-
 I-500 Series Pneumatic Isolators
I-500 Series Pneumatic Isolators1 Páginas
-
 LabLegs™ Upgrade Kits
LabLegs™ Upgrade Kits1 Páginas
-
 UCS Series Cleanroom Tables
UCS Series Cleanroom Tables1 Páginas
-
 TE Series Table Enclosures
TE Series Table Enclosures1 Páginas
-
 RS Series Research Grade Optical Tables
RS Series Research Grade Optical Tables3 Páginas
-
 LTE Series Light Tight Enclosure
LTE Series Light Tight Enclosure1 Páginas
-
 Oriel Integrating Spheres
Oriel Integrating Spheres5 Páginas
-
 Oriel Inspection Probes
Oriel Inspection Probes1 Páginas
-
 Oriel Flanged Sample Compartment
Oriel Flanged Sample Compartment1 Páginas
-
 Oriel Cuvettes and Cuvette Holders
Oriel Cuvettes and Cuvette Holders1 Páginas
-
 Oriel Focusing Lens Assembly
Oriel Focusing Lens Assembly2 Páginas
-
 Flat Gratings for Oriel Spectrometers
Flat Gratings for Oriel Spectrometers2 Páginas
-
 Xenon Flashlamps
Xenon Flashlamps2 Páginas
-
 Oriel InstaSpec X CCD
Oriel InstaSpec X CCD3 Páginas
-
 Oriel Mini Monochromator
Oriel Mini Monochromator3 Páginas
-
 Oriel 77200 1/4 m Monochromator
Oriel 77200 1/4 m Monochromator3 Páginas
-
 Oriel 77250 Series 1/8 m Monochromator
Oriel 77250 Series 1/8 m Monochromator3 Páginas
-
 Reflection and Fluorescence Probes
Reflection and Fluorescence Probes1 Páginas
-
 OSM2 Series Spectrometers
OSM2 Series Spectrometers2 Páginas
-
 Oriel IS Series Minispectrometers
Oriel IS Series Minispectrometers3 Páginas
-
 Light Sources for Minispectrometers
Light Sources for Minispectrometers1 Páginas
-
 Integrating Spheres and Cosine Corrector
Integrating Spheres and Cosine Corrector1 Páginas
-
 Fiber Optics for Minispectrometers
Fiber Optics for Minispectrometers2 Páginas
-
 Oriel MS127i™ 1/8 m Imaging Spectrograph
Oriel MS127i™ 1/8 m Imaging Spectrograph3 Páginas
-
 Oriel MS125™ 1/8 m Spectrograph
Oriel MS125™ 1/8 m Spectrograph1 Páginas
-
 Oriel Optical Choppers
Oriel Optical Choppers2 Páginas
-
 Oriel Low Cost Electronic Shutter
Oriel Low Cost Electronic Shutter1 Páginas
-
 Electronic Safety Shutters
Electronic Safety Shutters1 Páginas
-
 Oriel Electronic Fast Shutters
Oriel Electronic Fast Shutters2 Páginas
-
 Oriel Optical Shutter
Oriel Optical Shutter1 Páginas
-
 Iris Diaphragms
Iris Diaphragms1 Páginas
-
 Beam Apertures for Light Sources
Beam Apertures for Light Sources1 Páginas
-
 Adaptor Washers, Screw Sets
Adaptor Washers, Screw Sets1 Páginas
-
 Mounting Bridles
Mounting Bridles1 Páginas
-
 Adaptors and Retaining Rings
Adaptors and Retaining Rings1 Páginas
-
 Opto-Mechanical Components Set 2
Opto-Mechanical Components Set 21 Páginas
-
 Opto-Mechanical Components Set 1
Opto-Mechanical Components Set 11 Páginas
-
 X95 Structural Rails and Carriers
X95 Structural Rails and Carriers5 Páginas
-
 X26 Series Mirror Mount
X26 Series Mirror Mount1 Páginas
-
 X26 Series Cylindrical Laser Mounts
X26 Series Cylindrical Laser Mounts1 Páginas
-
 X26 Series Lens Mounts and Holders
X26 Series Lens Mounts and Holders4 Páginas
-
 X48 Series Aluminum Rails and Carriers
X48 Series Aluminum Rails and Carriers1 Páginas
-
 Precision Optical Rails and Carriers
Precision Optical Rails and Carriers2 Páginas
-
 Mini Optical Rails and Carriers
Mini Optical Rails and Carriers2 Páginas
-
 Slotted Bases
Slotted Bases2 Páginas
-
 SDS Series Angle Brackets
SDS Series Angle Brackets1 Páginas
-
 Rotation Adaptor
Rotation Adaptor1 Páginas
-
 PI Series Intermediate Adaptor Plates
PI Series Intermediate Adaptor Plates1 Páginas
-
 PBN Series Base Plates
PBN Series Base Plates1 Páginas
-
 Mounting Plates and Platforms
Mounting Plates and Platforms1 Páginas
-
 Modular Riser Plates
Modular Riser Plates1 Páginas
-
 Magnetic Bases
Magnetic Bases2 Páginas
-
 Kinematic Stops and Nudgers
Kinematic Stops and Nudgers1 Páginas
-
 Kinematic Bases
Kinematic Bases2 Páginas
-
 Fixed Height Platforms
Fixed Height Platforms1 Páginas
-
 EQ3 Series Angle Brackets for M-UMR3.5
EQ3 Series Angle Brackets for M-UMR3.51 Páginas
-
 EQ Series Angle Brackets
EQ Series Angle Brackets2 Páginas
-
 Base Clamps
Base Clamps1 Páginas
-
 360 Series Angle Brackets
360 Series Angle Brackets1 Páginas
-
 VALUMAX® Posts and Post Holders
VALUMAX® Posts and Post Holders1 Páginas
-
 Rod Platforms
Rod Platforms1 Páginas
-
 Rod Clamps
Rod Clamps1 Páginas
-
 Posts and Post Holders
Posts and Post Holders3 Páginas
-
 Post Clamps and Accessories
Post Clamps and Accessories1 Páginas
-
 Pedestal-Base Post Holders
Pedestal-Base Post Holders2 Páginas
-
 Modular Construction System
Modular Construction System1 Páginas
-
 Holders for Pedestal Posts
Holders for Pedestal Posts1 Páginas
-
 Heavy Duty Rod Systems
Heavy Duty Rod Systems2 Páginas
-
 Dual Rod Systems
Dual Rod Systems1 Páginas
-
 Breadboard Support Posts
Breadboard Support Posts1 Páginas
-
 Pedestal Post System
Pedestal Post System2 Páginas
-
 VersaStar™ Modular Filter Wheel
VersaStar™ Modular Filter Wheel1 Páginas
-
 Motorized Filter Wheels
Motorized Filter Wheels1 Páginas
-
 Manual Filter Wheels
Manual Filter Wheels1 Páginas
-
 Indexed Filter Wheel Mounts
Indexed Filter Wheel Mounts1 Páginas
-
 Filter Holders
Filter Holders1 Páginas
-
 Filter and Optic Holders
Filter and Optic Holders1 Páginas
-
 V-Blocks
V-Blocks1 Páginas
-
 Tip/Tilt Polarizer Rotation Mount
Tip/Tilt Polarizer Rotation Mount1 Páginas
-
 Precision Beam Steerers
Precision Beam Steerers1 Páginas
-
 Polarizer Rotation Mounts
Polarizer Rotation Mounts1 Páginas
-
 Pockels Cell Positioner
Pockels Cell Positioner1 Páginas
-
 Kin-a-Flip Mount
Kin-a-Flip Mount1 Páginas
-
 Diffraction Grating Mount
Diffraction Grating Mount2 Páginas
-
 Cube Beamsplitter Holders
Cube Beamsplitter Holders1 Páginas
-
 Beam Steerers
Beam Steerers1 Páginas
-
 Aegis Qube™ Beam Routing System
Aegis Qube™ Beam Routing System5 Páginas
-
 Variable Lens Holder
Variable Lens Holder1 Páginas
-
 Self-Centering Lens Mounts
Self-Centering Lens Mounts1 Páginas
-
 Rotatable Lens/Polarizer Mounting System
Rotatable Lens/Polarizer Mounting System1 Páginas
-
 Precision XY Optic Positioners
Precision XY Optic Positioners1 Páginas
-
 Multi-Axis Lens Positioners
Multi-Axis Lens Positioners4 Páginas
-
 Lens Focusing Mount
Lens Focusing Mount1 Páginas
-
 Fixed Lens Mounts
Fixed Lens Mounts1 Páginas
-
 Cylindrical Lens Holders
Cylindrical Lens Holders1 Páginas
-
 Compact Lens Positioners
Compact Lens Positioners1 Páginas
-
 Adjustable Lens Mounts
Adjustable Lens Mounts1 Páginas
-
 Adjustable Cylindrical Lens Mount
Adjustable Cylindrical Lens Mount1 Páginas
-
 UV Objective Lenses
UV Objective Lenses1 Páginas
-
 Reflective Microscope Objectives
Reflective Microscope Objectives2 Páginas
-
 Precision Objective Lenses
Precision Objective Lenses1 Páginas
-
 Objective Lenses
Objective Lenses1 Páginas
-
 Laser Diode Objective Lenses
Laser Diode Objective Lenses1 Páginas
-
 Ultrafast Laser Thin Film Polarizers
Ultrafast Laser Thin Film Polarizers1 Páginas
-
 Ultrafast Laser Output Coupler Mirrors
Ultrafast Laser Output Coupler Mirrors1 Páginas
-
 Ultrafast Laser Chirped Mirrors
Ultrafast Laser Chirped Mirrors2 Páginas
-
 Ultrafast Laser Broadband 45° Mirrors
Ultrafast Laser Broadband 45° Mirrors1 Páginas
-
 Ultrafast Laser Beam Sampler
Ultrafast Laser Beam Sampler1 Páginas
-
 Broadband Hollow Retroreflectors
Broadband Hollow Retroreflectors1 Páginas
-
 Volume Bragg Gratings™
Volume Bragg Gratings™1 Páginas
-
 Plane Holographic Reflection Gratings
Plane Holographic Reflection Gratings1 Páginas
-
 Plane Ruled Reflection Gratings
Plane Ruled Reflection Gratings2 Páginas
-
 Variable Attenuator/Beamsplitters
Variable Attenuator/Beamsplitters1 Páginas
-
 UV Non-Polarizing Cube Beamsplitters
UV Non-Polarizing Cube Beamsplitters1 Páginas
-
 Pellicle Beamsplitters
Pellicle Beamsplitters1 Páginas
-
 Laser Line Non-Polarizing Beamsplitters
Laser Line Non-Polarizing Beamsplitters1 Páginas
-
 Laser Line Polarizing Cube Beamsplitters
Laser Line Polarizing Cube Beamsplitters1 Páginas
-
 Broadband Beam Samplers
Broadband Beam Samplers1 Páginas
-
 Broadband Dielectric Beamsplitters
Broadband Dielectric Beamsplitters1 Páginas
-
 Zero-Order Quartz Wave Plates
Zero-Order Quartz Wave Plates1 Páginas
-
 Zero-Order Precision Wave Plates
Zero-Order Precision Wave Plates1 Páginas
-
 Precision Linear Polarizers
Precision Linear Polarizers1 Páginas
-
 Polarcor™ Linear Polarizers
Polarcor™ Linear Polarizers1 Páginas
-
 Multiple-Order Quartz Wave Plates
Multiple-Order Quartz Wave Plates1 Páginas
-
 Glan-Laser Calcite Polarizers
Glan-Laser Calcite Polarizers1 Páginas
-
 Glan-Thompson Calcite Polarizers
Glan-Thompson Calcite Polarizers1 Páginas
-
 Broadband Polarizing Cube Beamsplitters
Broadband Polarizing Cube Beamsplitters1 Páginas
-
 Broadband Polarization Rotators
Broadband Polarization Rotators1 Páginas
-
 Achromatic Zero-Order Wave Plates
Achromatic Zero-Order Wave Plates1 Páginas
-
 Infrared Lenses
Infrared Lenses1 Páginas
-
 BK 7 Precision Plano-Concave Lenses
BK 7 Precision Plano-Concave Lenses1 Páginas
-
 BK 7 Precision Plano-Convex Lenses
BK 7 Precision Plano-Convex Lenses2 Páginas
-
 BK 7 Precision Bi-Convex Lenses
BK 7 Precision Bi-Convex Lenses2 Páginas
-
 BK 7 Precision Bi-Concave Lenses
BK 7 Precision Bi-Concave Lenses1 Páginas
-
 Molded Glass Aspheric Lenses
Molded Glass Aspheric Lenses3 Páginas
-
 Aspheric Condenser Lenses
Aspheric Condenser Lenses1 Páginas
-
 Spherical Ball Micro Lenses
Spherical Ball Micro Lenses1 Páginas
-
 Precision Cylindrical Lens Sets
Precision Cylindrical Lens Sets1 Páginas
-
 Precision Achromatic Doublet Lenses
Precision Achromatic Doublet Lenses2 Páginas
-
 Gradient Index Micro Lenses
Gradient Index Micro Lenses2 Páginas
-
 BK 7 Precision Cylindrical Lenses
BK 7 Precision Cylindrical Lenses2 Páginas
-
 Three-Axis Spatial Filters
Three-Axis Spatial Filters2 Páginas
-
 Precision Singlet Lens Sets
Precision Singlet Lens Sets3 Páginas
-
 OptiSet™ Optics Sets
OptiSet™ Optics Sets2 Páginas
-
 Laser Collimator
Laser Collimator1 Páginas
-
 Laser Beam Expanders
Laser Beam Expanders2 Páginas
-
 High-Energy Pinhole Apertures
High-Energy Pinhole Apertures1 Páginas
-
 High-Energy Variable Attenuators
High-Energy Variable Attenuators3 Páginas
-
 High-Energy Laser Beam Expanders
High-Energy Laser Beam Expanders2 Páginas
-
 Faraday Optical Isolator, Free-Space
Faraday Optical Isolator, Free-Space3 Páginas
-
 Electronic Shutter System
Electronic Shutter System1 Páginas
-
 Compensated Attenuators
Compensated Attenuators1 Páginas
-
 Compact Five-Axis Spatial Filters
Compact Five-Axis Spatial Filters2 Páginas
-
 UV Beam Viewer
UV Beam Viewer1 Páginas
-
 Shear Plate Collimation Tester
Shear Plate Collimation Tester1 Páginas
-
 Sapphire Windows
Sapphire Windows1 Páginas
-
 Interferometer Flats
Interferometer Flats1 Páginas
-
 High-Energy Laser Wedged Windows
High-Energy Laser Wedged Windows1 Páginas
-
 Parallel Windows
Parallel Windows1 Páginas
-
 Light Pipe Homogenizer
Light Pipe Homogenizer1 Páginas
-
 Replicated Hollow Metal Retroreflectors
Replicated Hollow Metal Retroreflectors1 Páginas
-
 VALUMAX® Right-Angle Prisms
VALUMAX® Right-Angle Prisms1 Páginas
-
 Precision Right-Angle Prisms
Precision Right-Angle Prisms1 Páginas
-
 VALUMAX® Broadband Mirrors
VALUMAX® Broadband Mirrors2 Páginas
-
 Utility Broadband Metallic Mirrors
Utility Broadband Metallic Mirrors1 Páginas
-
 Ultra-Low Loss SuperMirrors™
Ultra-Low Loss SuperMirrors™2 Páginas
-
 Off-Axis Replicated Parabolic Mirrors
Off-Axis Replicated Parabolic Mirrors1 Páginas
-
 Laser Line Dielectric Mirrors
Laser Line Dielectric Mirrors2 Páginas
-
 High-Energy Nd:YAG Laser Mirrors
High-Energy Nd:YAG Laser Mirrors2 Páginas
-
 High-Energy Excimer Laser Mirrors
High-Energy Excimer Laser Mirrors2 Páginas
-
 Ellipsoidal and Paraboloidal Reflectors
Ellipsoidal and Paraboloidal Reflectors2 Páginas
-
 Concave Broadband Metallic Mirrors
Concave Broadband Metallic Mirrors1 Páginas
-
 Broadband SuperMirrors™
Broadband SuperMirrors™1 Páginas
-
 Broadband Metallic Mirrors
Broadband Metallic Mirrors2 Páginas
-
 Broadband Dielectric Mirrors
Broadband Dielectric Mirrors2 Páginas
-
 Oriel Thermopile Detector Preamplifier
Oriel Thermopile Detector Preamplifier1 Páginas
-
 Oriel TE Cooler Controller
Oriel TE Cooler Controller1 Páginas
-
 Oriel Laboratory Power Supply
Oriel Laboratory Power Supply1 Páginas
-
 Oriel Current Preamplifier
Oriel Current Preamplifier1 Páginas
-
 Oriel Wide Bandwidth Voltage Amplifiers
Oriel Wide Bandwidth Voltage Amplifiers1 Páginas
-
 Oriel Photomultiplier Tube Power Supply
Oriel Photomultiplier Tube Power Supply1 Páginas
-
 High Resolution CCD Laser Beam Profiler
High Resolution CCD Laser Beam Profiler1 Páginas
-
 Micro-Beam Profiler
Micro-Beam Profiler1 Páginas
-
 Laser Beam Profiler
Laser Beam Profiler2 Páginas
-
 High-Speed Photodetectors, GHz
High-Speed Photodetectors, GHz7 Páginas
-
 Oriel TE Cooled HgCdZnTe Detectors
Oriel TE Cooled HgCdZnTe Detectors1 Páginas
-
 Oriel Silicon Detectors
Oriel Silicon Detectors2 Páginas
-
 Oriel Pb and PbSe Detectors
Oriel Pb and PbSe Detectors2 Páginas
-
 Oriel InGaAs and Ge Detectors
Oriel InGaAs and Ge Detectors2 Páginas
-
 Oriel Miniature Thermopile Detectors
Oriel Miniature Thermopile Detectors2 Páginas
-
 Oriel Photomultiplier Tubes
Oriel Photomultiplier Tubes2 Páginas
-
 Portable Optical Power Meter, 842-PE
Portable Optical Power Meter, 842-PE2 Páginas
-
 Laser Power Meter, Analog, 407A
Laser Power Meter, Analog, 407A2 Páginas
-
 Fiber Optic Detectors
Fiber Optic Detectors2 Páginas
-
 PulseScout Autocorrelator
PulseScout Autocorrelator2 Páginas
-
 Heat Control Filters
Heat Control Filters1 Páginas
-
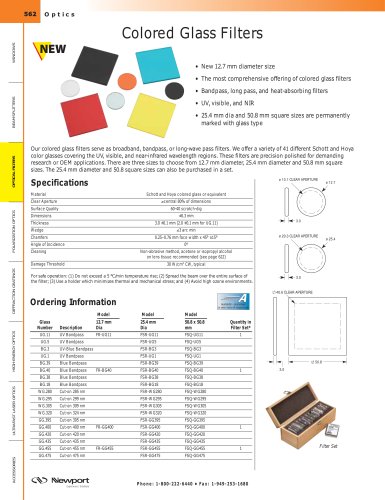 Colored Glass Filters
Colored Glass Filters3 Páginas
-
 Bandpass Filters
Bandpass Filters4 Páginas
-
 Laser Line Filters
Laser Line Filters2 Páginas
-
 Infrared Neutral Density Filters
Infrared Neutral Density Filters1 Páginas
-
 Absorptive Neutral Density Filters
Absorptive Neutral Density Filters2 Páginas
-
 Short and Long-Wave Pass Filters
Short and Long-Wave Pass Filters2 Páginas
-
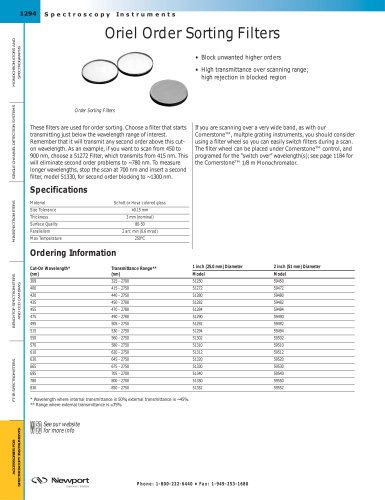 Oriel Order Sorting Filters
Oriel Order Sorting Filters1 Páginas
-
 Photonics Control Devices, Conex™
Photonics Control Devices, Conex™4 Páginas
-
 UZ Series Vertical Linear Stages
UZ Series Vertical Linear Stages2 Páginas
-
 VP-5ZA Precision Vertical Linear Stages
VP-5ZA Precision Vertical Linear Stages2 Páginas
-
 LDS-Vector Electronic Autocollimator
LDS-Vector Electronic Autocollimator2 Páginas
-
 HXP100 Hexapod
HXP100 Hexapod2 Páginas
-
 Microscopy Tools Micromanipulators
Microscopy Tools Micromanipulators4 Páginas
-
 NanoPositioning Linear Stages
NanoPositioning Linear Stages4 Páginas
-
 Objective NanoFocusing Stages
Objective NanoFocusing Stages2 Páginas
-
 NanoPositioning Piezo Translators
NanoPositioning Piezo Translators2 Páginas
-
 Accessories Controller/Driver Cables
Accessories Controller/Driver Cables1 Páginas
-
 TRA Series Compact Motorized Actuators
TRA Series Compact Motorized Actuators2 Páginas
-
 Miniature Linear Actuator NewStep Series
Miniature Linear Actuator NewStep Series1 Páginas
-
 LTA Series Precision Motorized Actuators
LTA Series Precision Motorized Actuators2 Páginas
-
 CMA Series Compact Motorized Actuators
CMA Series Compact Motorized Actuators2 Páginas
-
 URS Series Precision Rotation Stages
URS Series Precision Rotation Stages3 Páginas
-
 NewStep NSR Series Universal Rotator
NewStep NSR Series Universal Rotator2 Páginas
-
 BG Series Goniometric Cradles
BG Series Goniometric Cradles4 Páginas
-
 VP-25X Precision Compact Linear Stages
VP-25X Precision Compact Linear Stages3 Páginas
-
 MFA Series Miniature Linear Stages
MFA Series Miniature Linear Stages2 Páginas
-
 GTS Series High-precision linear stages
GTS Series High-precision linear stages2 Páginas
-
 EL/EN Series Lab Jacks
EL/EN Series Lab Jacks1 Páginas
-
 ECN/ECR Series Lab Jacks
ECN/ECR Series Lab Jacks2 Páginas
-
 271/281 Series High Load Lab Jacks
271/281 Series High Load Lab Jacks2 Páginas
-
 Single-Mode Fiber Couplers
Single-Mode Fiber Couplers1 Páginas
-
 Precision Single-Mode Fiber Couplers
Precision Single-Mode Fiber Couplers1 Páginas
-
 Multimode Fiber Couplers
Multimode Fiber Couplers2 Páginas
-
 GRIN Lens Fiber Couplers
GRIN Lens Fiber Couplers1 Páginas
-
 FPH Series Fiber Chucks and Holders
FPH Series Fiber Chucks and Holders1 Páginas
-
 Fiber Optic Positioners
Fiber Optic Positioners3 Páginas
-
 561/562 Series ULTRAlign™ Accessories
561/562 Series ULTRAlign™ Accessories4 Páginas
-
 466A Series Options and Accessories
466A Series Options and Accessories3 Páginas
-
 466A Series XYZ Flexure Stages
466A Series XYZ Flexure Stages1 Páginas
-
 SM Series Vernier Micrometers
SM Series Vernier Micrometers1 Páginas
-
 DM Series Differential Micrometers
DM Series Differential Micrometers2 Páginas
-
 BM Series Micrometers
BM Series Micrometers2 Páginas
-
 BHC Series Precision Adjustment Screws
BHC Series Precision Adjustment Screws1 Páginas
-
 UTR Series Precision Rotation Stages
UTR Series Precision Rotation Stages3 Páginas
-
 RS Series Low-Profile Rotation Stages
RS Series Low-Profile Rotation Stages1 Páginas
-
 30 Series Multi-Axis Tilt Platforms
30 Series Multi-Axis Tilt Platforms2 Páginas
-
 TSX-1D Series Dovetail Linear Stages
TSX-1D Series Dovetail Linear Stages1 Páginas
-
 MT Series Compact Dovetail Linear Stages
MT Series Compact Dovetail Linear Stages2 Páginas
-
 MS Series Miniature Linear Stages
MS Series Miniature Linear Stages4 Páginas
-
 DS Series Compact Dovetail Linear Stages
DS Series Compact Dovetail Linear Stages2 Páginas
-
 Oriel® Radiometric Fiber Optic Source
Oriel® Radiometric Fiber Optic Source1 Páginas
-
 Apex Fiber Illuminators
Apex Fiber Illuminators2 Páginas
-
 Series Q Deuterium Sources
Series Q Deuterium Sources1 Páginas
-
 Deuterium Lamp Power Supplies
Deuterium Lamp Power Supplies1 Páginas
-
 Deuterium Lamps
Deuterium Lamps2 Páginas
-
 Apex Deuterium Lamp Sources
Apex Deuterium Lamp Sources1 Páginas
-
 Spacer Tubes for Light Sources
Spacer Tubes for Light Sources1 Páginas
-
 Oriel Ozone Eater
Oriel Ozone Eater1 Páginas
-
 Ozone Blowers
Ozone Blowers1 Páginas
-
 Flange Mounted Cells
Flange Mounted Cells1 Páginas
-
 Digital Light Intensity Controller
Digital Light Intensity Controller2 Páginas
-
 Beam Turning Assemblies
Beam Turning Assemblies2 Páginas
-
 Aspherab Lens Assemblies
Aspherab Lens Assemblies2 Páginas
-
 Mounts for Beam Probes
Mounts for Beam Probes1 Páginas
-
 Manual Iris Diaphragms for Light Sources
Manual Iris Diaphragms for Light Sources1 Páginas
-
 Liquid Filters for Light Sources
Liquid Filters for Light Sources1 Páginas
-
 Input Hood for Light Sources
Input Hood for Light Sources1 Páginas
-
 Holders for Oriel Single Fibers
Holders for Oriel Single Fibers2 Páginas
-
 Holders for Oriel Flanged Components
Holders for Oriel Flanged Components2 Páginas
-
 Flexible Light Shields for Light Sources
Flexible Light Shields for Light Sources1 Páginas
-
 Flanged Mounts for Fiber Bundles
Flanged Mounts for Fiber Bundles1 Páginas
-
 Filter Holder for Beam Probes
Filter Holder for Beam Probes1 Páginas
-
 Diffusing Beam Probes for Fiber Bundles
Diffusing Beam Probes for Fiber Bundles1 Páginas
-
 Coupling Rings for Light Sources
Coupling Rings for Light Sources1 Páginas
-
 Beam Splitting Module for Beam Probes
Beam Splitting Module for Beam Probes1 Páginas
-
 Flood Exposure Sources
Flood Exposure Sources6 Páginas
-
 Mask Alignment Tools
Mask Alignment Tools4 Páginas
-
 Reference Solar Cell and Meter
Reference Solar Cell and Meter1 Páginas
-
 Class A Solar Simulators
Class A Solar Simulators3 Páginas
-
 1600 W Oriel Solar Simulators
1600 W Oriel Solar Simulators4 Páginas
-
 150 - 300 W Solar Simulators
150 - 300 W Solar Simulators2 Páginas
-
 150 W Low Cost Solar Simulator
150 W Low Cost Solar Simulator2 Páginas
-
 Apex Monochromator Illuminators
Apex Monochromator Illuminators4 Páginas
-
 7340 Series Monochromator Illuminators
7340 Series Monochromator Illuminators2 Páginas
-
 Quartz Tungsten Halogen Lamps
Quartz Tungsten Halogen Lamps3 Páginas
-
 Blackbodies
Blackbodies2 Páginas
-
 Apex Quartz Tungsten Halogen Sources
Apex Quartz Tungsten Halogen Sources2 Páginas
-
 Apex Infrared Light Sources
Apex Infrared Light Sources2 Páginas
-
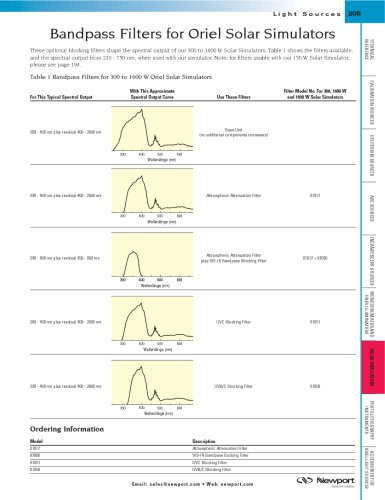 Bandpass Filters for Solar Simulators
Bandpass Filters for Solar Simulators1 Páginas
-
 Xenon Flashlamp Systems
Xenon Flashlamp Systems2 Páginas
-
 Uniform Illuminators
Uniform Illuminators3 Páginas
-
 Simplicity Series Arc Sources
Simplicity Series Arc Sources2 Páginas
-
 Series Q Lamp Housings
Series Q Lamp Housings4 Páginas
-
 Series Q Arc Lamp Sources
Series Q Arc Lamp Sources2 Páginas
-
 Silicon Carbide Light Source
Silicon Carbide Light Source1 Páginas
-
 Oriel PhotoMax Lamp Housing
Oriel PhotoMax Lamp Housing3 Páginas
-
 Fading Test System
Fading Test System1 Páginas
-
 Digital Arc Lamp Power Supplies
Digital Arc Lamp Power Supplies2 Páginas
-
 Modular Infrared Light Sources
Modular Infrared Light Sources2 Páginas
-
 Digital Radiometric Power Supplies
Digital Radiometric Power Supplies2 Páginas
-
 DC Short Arc Lamps
DC Short Arc Lamps3 Páginas
-
 50 - 200 W Research Arc Lamp Sources
50 - 200 W Research Arc Lamp Sources2 Páginas
-
 450 - 1000 W Research Arc Lamp Sources
450 - 1000 W Research Arc Lamp Sources2 Páginas
-
 1600 W Research Arc Lamp Sources
1600 W Research Arc Lamp Sources1 Páginas
-
 Research Arc Lamp Housings
Research Arc Lamp Housings3 Páginas
-
 Apex Arc Lamp Sources
Apex Arc Lamp Sources2 Páginas
-
 Calibrated Sources and Services
Calibrated Sources and Services2 Páginas
-
 200 - 500 W Hg Research Arc Sources
200 - 500 W Hg Research Arc Sources2 Páginas
-
 Pencil Style Calibration Lamps
Pencil Style Calibration Lamps3 Páginas
-
 High Power Spectral Calibration Lamps
High Power Spectral Calibration Lamps2 Páginas
-
 Laser Diode Adaptors
Laser Diode Adaptors1 Páginas
-
 Cylindrical Laser Mounts
Cylindrical Laser Mounts1 Páginas
-
 762 Series High-Power Laser Diode Mounts
762 Series High-Power Laser Diode Mounts3 Páginas
-
 Laser Diode Drivers, 500B Series
Laser Diode Drivers, 500B Series2 Páginas
-
 TEC Controller, 300B Series
TEC Controller, 300B Series2 Páginas
-
 Solano Series Air-Cooled Ion Lasers
Solano Series Air-Cooled Ion Lasers1 Páginas
-
 163C AIR-COOLED ION LASER SYSTEMS
163C AIR-COOLED ION LASER SYSTEMS2 Páginas
-
 163D AIR-COOLED ION LASER SYSTEMS
163D AIR-COOLED ION LASER SYSTEMS2 Páginas
-
 163A AIR-COOLED ION LASER SYSTEMS
163A AIR-COOLED ION LASER SYSTEMS2 Páginas
-
 VBG Raman Laser Modules
VBG Raman Laser Modules2 Páginas
-
 Laser Diode Modules, LQN Series
Laser Diode Modules, LQN Series2 Páginas
-
 Alignment Laser
Alignment Laser1 Páginas
-
 Ultraviolet Safety Equipment
Ultraviolet Safety Equipment1 Páginas
-
 Laser Safety Glasses and Goggles
Laser Safety Glasses and Goggles4 Páginas
-
 Laser Safety Windows
Laser Safety Windows1 Páginas
-
 Infrared IR Viewer
Infrared IR Viewer1 Páginas
-
 177 Air-Cooled Ion Lasers
177 Air-Cooled Ion Lasers2 Páginas
-
 Beam Dump
Beam Dump1 Páginas
-
 Empower ® Q-Switched Laser
Empower ® Q-Switched Laser2 Páginas
-
 V-Xtreme™ Q-Switched Laser
V-Xtreme™ Q-Switched Laser2 Páginas
-
 HIPPO™ High Power Q-switched Laser
HIPPO™ High Power Q-switched Laser4 Páginas
-
 Fiber Pigtailed Laser Diode
Fiber Pigtailed Laser Diode1 Páginas
-
 488 nm CW Laser- Cyan™ OEM
488 nm CW Laser- Cyan™ OEM2 Páginas
-
 CW Lasers- Excelsior® OEM
CW Lasers- Excelsior® OEM4 Páginas
-
 Automated Ultrafast OPA-TOPAS™
Automated Ultrafast OPA-TOPAS™4 Páginas
-
 Inspire™ OPO Family
Inspire™ OPO Family2 Páginas
-
 Unison™ Ultrafast Amplifier System
Unison™ Ultrafast Amplifier System4 Páginas
-
 Scan Series Nanosecond OPO Family
Scan Series Nanosecond OPO Family6 Páginas
-
 3900S Titanium:Sapphire CW Laser
3900S Titanium:Sapphire CW Laser4 Páginas
-
 WaveTrain® CW Frequency Doubler
WaveTrain® CW Frequency Doubler2 Páginas
-
 Excelsior™ Low Power CW Lasers
Excelsior™ Low Power CW Lasers4 Páginas
-
 Polarization Controller, Manual
Polarization Controller, Manual2 Páginas
-
 Polarization Beam Combiner/Splitter
Polarization Beam Combiner/Splitter1 Páginas
-
 DPSS Lasers- Millenia® Prime™
DPSS Lasers- Millenia® Prime™3 Páginas
-
 Fiber Optic In-Line Polarizers
Fiber Optic In-Line Polarizers1 Páginas
-
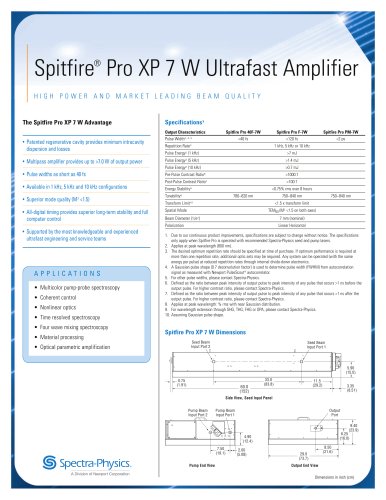
 Spitfire® Pro XP Ultrafast Amplifier
Spitfire® Pro XP Ultrafast Amplifier2 Páginas
-
 Fiber Optic Depolarizers
Fiber Optic Depolarizers1 Páginas
-
 Quanta-Ray® Nd-YAG Laser Family
Quanta-Ray® Nd-YAG Laser Family5 Páginas
-
 Fiber Optic Faraday Rotator Mirrors
Fiber Optic Faraday Rotator Mirrors1 Páginas
-
 Mode Scrambler
Mode Scrambler1 Páginas
-
 Index-Matching Fluid
Index-Matching Fluid1 Páginas
-
 Fiber Optic Scribes
Fiber Optic Scribes1 Páginas
-
 Fiber Optic Mating Adapter Sleeves
Fiber Optic Mating Adapter Sleeves1 Páginas
-
 Fiber Jacket Stripper
Fiber Jacket Stripper1 Páginas
-
 Variable Ratio Couplers
Variable Ratio Couplers2 Páginas
-
 Fixed Fiber Optic Attenuator
Fixed Fiber Optic Attenuator1 Páginas
-
 Fiber Optic Switches
Fiber Optic Switches2 Páginas
-
 Fiber Optic In-Line Isolators
Fiber Optic In-Line Isolators1 Páginas
-
 Kevlar® Shears
Kevlar® Shears1 Páginas
-
 Polarization Insensitive Circulators
Polarization Insensitive Circulators1 Páginas
-
 Fiber Preparation Kit
Fiber Preparation Kit1 Páginas
-
 Fiber Optic Splice
Fiber Optic Splice1 Páginas
-
 Benchtop Couplers and WDMs
Benchtop Couplers and WDMs1 Páginas
-
 Fiber Coating Stripper
Fiber Coating Stripper1 Páginas
-
 Ferrules for Oriel Fiber Bundles
Ferrules for Oriel Fiber Bundles1 Páginas
-
 Electronic Fiber Cleavers
Electronic Fiber Cleavers1 Páginas
-
 Coupler for Oriel Fiber Bundles
Coupler for Oriel Fiber Bundles1 Páginas
-
 Fiber Optic Isolator
Fiber Optic Isolator2 Páginas
-
 Fiber Pigtailed Collimator
Fiber Pigtailed Collimator1 Páginas
-
 Fiber Optic Collimators
Fiber Optic Collimators2 Páginas
-
 Tunable Bandpass Fiber Optic Filter
Tunable Bandpass Fiber Optic Filter2 Páginas
-
 Polarization Extinction Ratio Meter
Polarization Extinction Ratio Meter1 Páginas
-
 Single Mode Fibers, Bend-Insensitive
Single Mode Fibers, Bend-Insensitive1 Páginas
-
 Single Mode Fibers and Patch Cords
Single Mode Fibers and Patch Cords2 Páginas
-
 Photosensitive Fiber for Fiber Gratings
Photosensitive Fiber for Fiber Gratings1 Páginas
-
 Photonic Crystal Fibers
Photonic Crystal Fibers4 Páginas
-
 Oriel Multi-track Fiber Bundles
Oriel Multi-track Fiber Bundles2 Páginas
-
 Communication Grade Fibers
Communication Grade Fibers1 Páginas
-
 Infrared Fibers
Infrared Fibers1 Páginas
-
 Supercontinuum Generation Fiber Devices
Supercontinuum Generation Fiber Devices1 Páginas
-
 Single Branch Fiber Bundles
Single Branch Fiber Bundles1 Páginas
-
 Multi-Branch Fiber Optic Bundles
Multi-Branch Fiber Optic Bundles1 Páginas
-
 Power Delivery Fibers
Power Delivery Fibers1 Páginas
-
 Liquid Light Guides
Liquid Light Guides2 Páginas