- Catalogs
- Suzhou Honpine Precision Industry Co., Ltd.
- harmonic drive robot joint motor catelog
- Company
- Products
- Catalogs
- News & Trends
- Exhibitions
harmonic drive robot joint motor catelog
1 /18Pages
harmonic drive robot joint motor catelog
1 /18Pages
Catalog excerpts

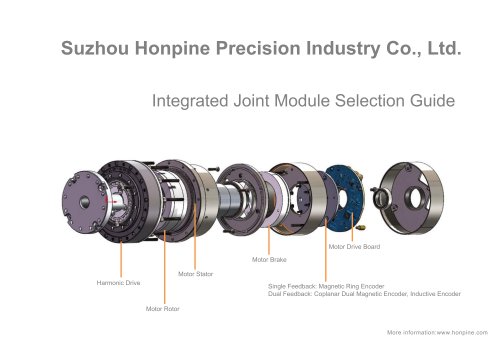
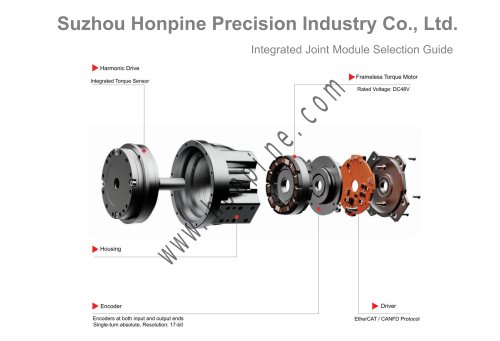
Suzhou Honpine Precision Industry Co., Ltd. Integrated Joint Module Selection Guide Motor Drive Board Motor Brake Motor Stator Harmonic Drive Single Feedback: Magnetic Ring Encoder Dual Feedback: Coplanar Dual Magnetic Encoder, Inductive Encoder Motor Rotor More information:www.honpine.com
Open the catalog to page 1
Product Catalog 1. Specifications 16.Brake Torque and Main Bearing Load Par
Open the catalog to page 2
P/N Interpretation The standard communication protocol is CAN bus (supporting both CANopen and proprietary CAN). The brake (B), dual feedback (2E), and EtherCAT (EC) communication are optional features. Take model HPJM-RE40-52-PRO-81-B-2E-EC as an example Important Precautions: ①Never operate with overvoltage or overload. ②Never disassemble the motor without authorization. ③Ensure installation within the effective thread depth. ④Avoid stalling or emergency braking at high speeds. ⑤Do not hot-plug the motor while it is powered.
Open the catalog to page 3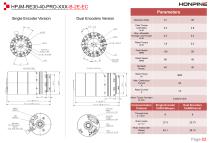
Parameters Single Encoder Version Dual Encoders Version Reduction Ratio 51 101 Peak Torque (start/stop) Max. Allowable Average Load Torque N-M Rotor Inertia (with Brake) g * cm Single Encoder CAN/CANopen Dual Encoders CAN/Ethercat
Open the catalog to page 4
Single Encoder Version Dual Encoders Version
Open the catalog to page 5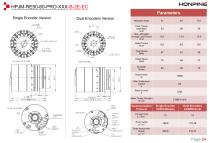
Single Encoder Version Dual Encoders Version
Open the catalog to page 6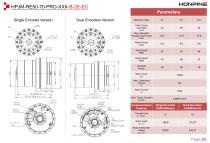
Single Encoder Version Dual Encoders Version
Open the catalog to page 7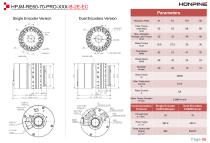
Parameters Single Encoder Version Dual Encoders Version EtherCAT Ng u AI00&WY-S-4P Peak Torque (start/stop) Max. Allowable Average Load Torque N-M Motor Torque Constant N-m/A Rotor Inertia (with Brake) g * cm Single Encoder CAN/CANopen Dual Encoders CAN/Ethercat
Open the catalog to page 8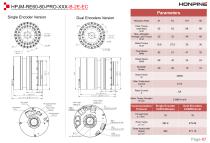
Single Encoder Version Dual Encoders Version
Open the catalog to page 9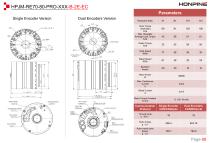
Single Encoder Version Dual Encoders Version E therCAT IN£ p XA100SW-S-4P
Open the catalog to page 10
Single Encoder Version CAN and Power interface Power interface Dual Encoders Version
Open the catalog to page 11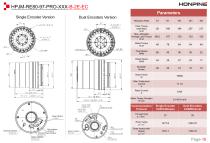
Dual Encoders Version Download interface ^ HPJM-RE80-97-PRQ-XXX-B-2E-ECSingle Encoder Version Power interface Battery interface
Open the catalog to page 12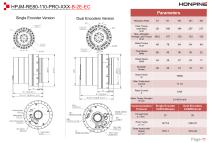
Single Encoder Version Dual Encoders Version
Open the catalog to page 13
Single Encoder Version Dual Encoders Version
Open the catalog to page 14
Single Encoder Version Dual Encoders Version
Open the catalog to page 15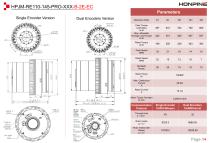
Parameters Single Encoder Version Dual Encoders Version Reduction Ratio 51 81 101 121 161 Peak Torque (start/stop) Max. Allowable Average Load Torque N-M Rotor Inertia (with Brake) g * cm Single Encoder CAN/CANopen Dual Encoders CAN/Ethercat
Open the catalog to page 16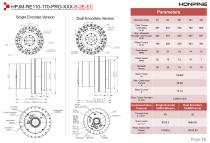
Single Encoder Version CAN and Power interface XI002H—04 Dual Encoders Version Download interface XIO02H-O3L
Open the catalog to page 17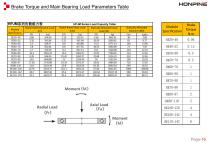
Brake Torque and Main Bearing Load Parameters Table Module Specification Radial Rated Dynamic Load (Cr) HPJM Series Load Capacity Table Radial Rated Static Load Statically Allowable Axial (C0r) Load (Fa) Statically Allowable Moment (M0) Module Specification Radial Load Axial Load Moment
Open the catalog to page 18All Suzhou Honpine Precision Industry Co., Ltd. catalogs and technical brochures
 mini harmonic drive reducer
mini harmonic drive reducer27 Pages
 Harmonic Rotary Module
Harmonic Rotary Module14 Pages
 Dexterous Robot Hand
Dexterous Robot Hand8 Pages
 HONPINE Precision Motion Control
HONPINE Precision Motion Control17 Pages
 Integrated Robot Servo Wheel
Integrated Robot Servo Wheel7 Pages
 RV Reducer Gearbox
RV Reducer Gearbox15 Pages
 High Precision Planetary Gearbox
High Precision Planetary Gearbox48 Pages
 Robot RV Cycloid Gear Reducer
Robot RV Cycloid Gear Reducer58 Pages
 Planetary Robot Joint Actuator
Planetary Robot Joint Actuator14 Pages
 Harmonic AC Servo Motor
Harmonic AC Servo Motor33 Pages
 HONPINE harmonic drive catelog
HONPINE harmonic drive catelog109 Pages



- Electromotor
- Synchronous motor
- Actuator
- Industrial robot
- Electric gearmotor
- Linear actuator
- Electric actuator
- Planetary gearbox
- Coaxial gearhead
- Mechanical protection protection gloves
- Electromotor for industrial applications
- EC motor
- Precision gearhead
- Articulated robot
- 24 V motor
- Direct current gear-motor
- Right angle gearhead
- 6-axis robot
- Compact gearhead
- Servo-motor