- Company
- Products
- Catalogs
- News & Trends
- Exhibitions
ER-MIMU-044
1 /6Pages

ER-MIMU-044
1 /6Pages
Catalog excerpts

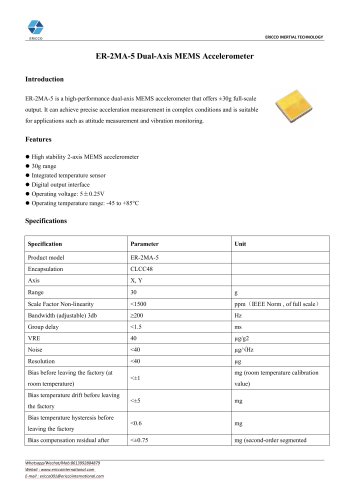
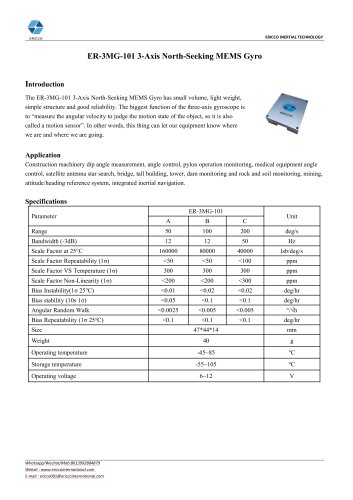
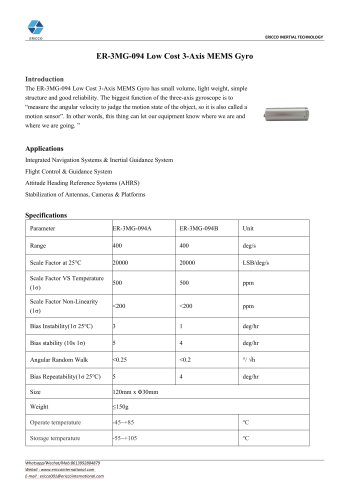
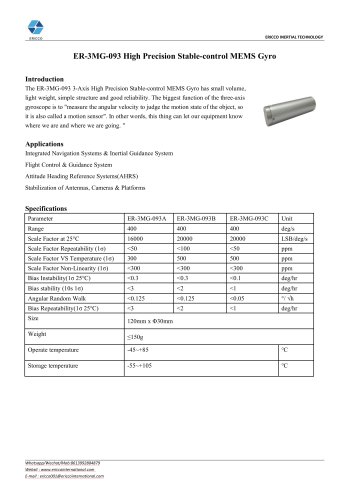
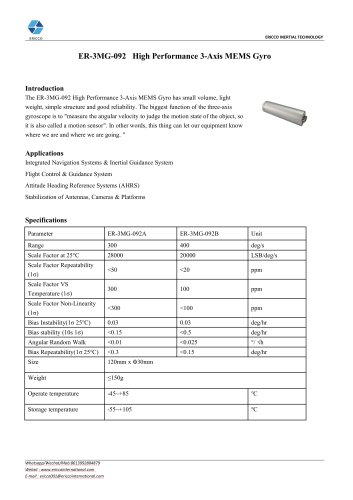
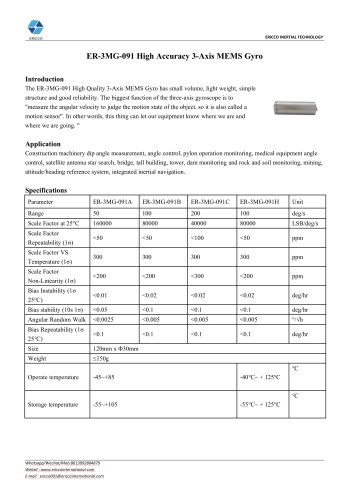
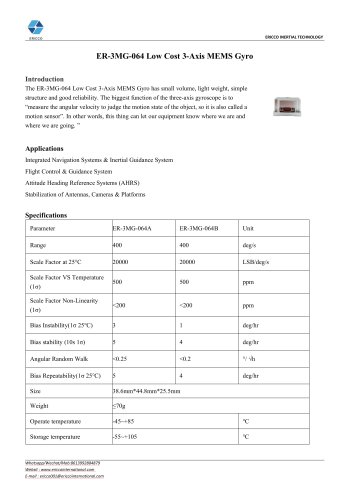
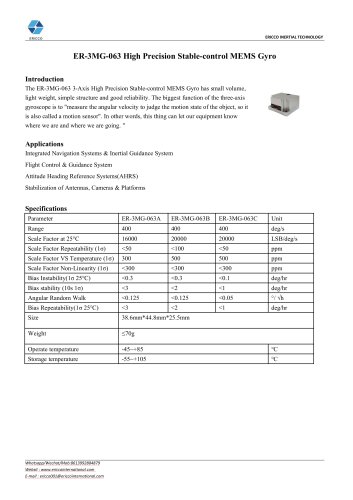
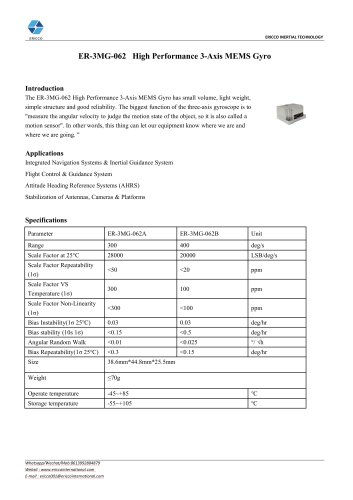
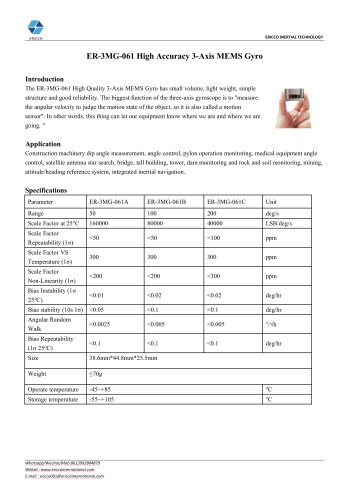
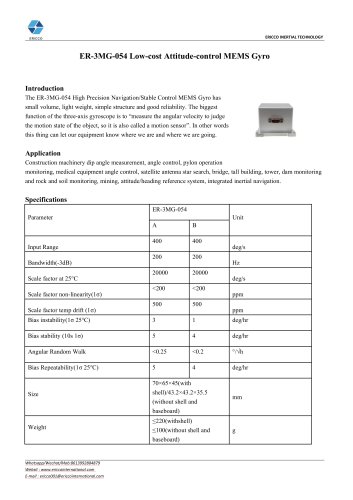
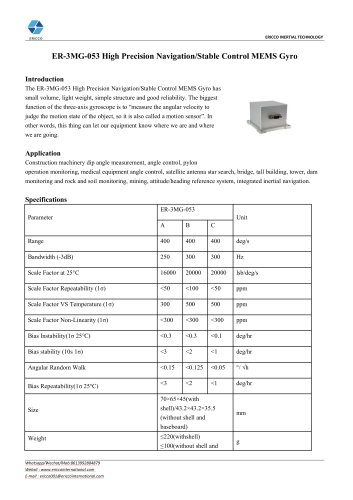
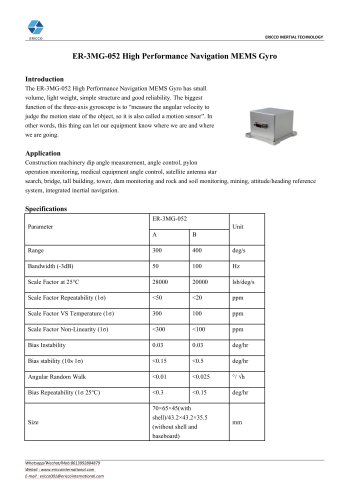
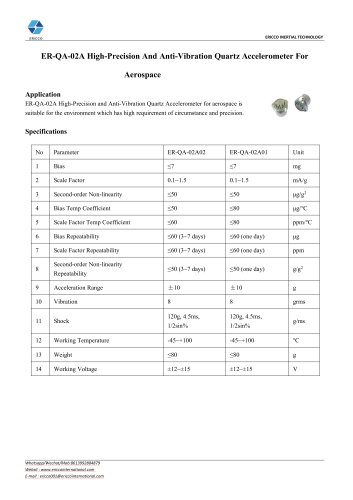
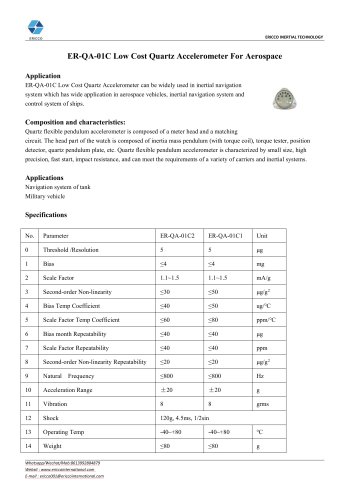
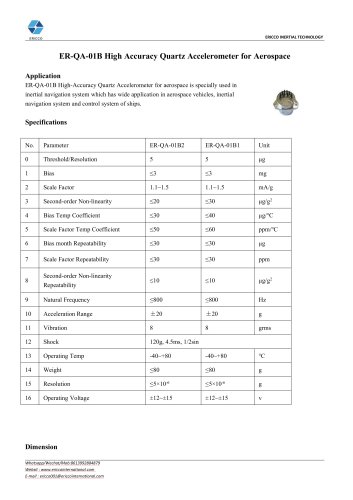
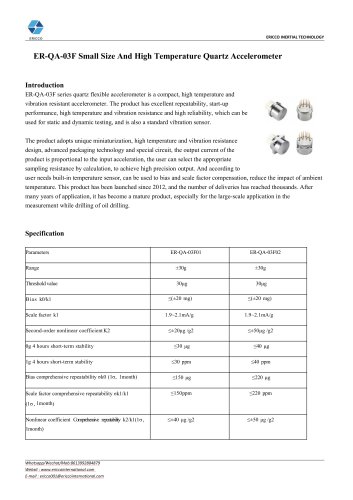
ERICCO INERTIAL TECNOLOGY ER-MIMU-044 Ultra-size OEM Attitude-control MEMS IMU Introduction Inertial Measurement Unit, referred to as IMU, is a device to measure the attitude angle (or angular velocity) and acceleration of the three axis of the object. Gyroscope and accelerometer are the core devices of inertial navigation system (INS). With the built-in accelerometer sensor and gyroscope, the IMU can measure the linear acceleration and rotation angular velocity from three directions and can obtain the attitude, velocity and displacement information of the carrier through the resolving. ER-MIMU-044 uses MEMS accelerometer and gyroscope with high quality and reliability, RS422 and external communication. Default baud rate 921600 (customized). With X, Y, Z three-axis precision gyro, X, Y, Z three-axis accelerometer with high resolution, can be output by RS422 X, Y, Z three axis of gyroscope and accelerometer's original hexadecimal complement data (including gyro hexadecimal complement the numerical temperature, angle, the accelerometer hexadecimal temperature, the acceleration hexadecimal complement number); It can also output float dimensionless values of the gyroscope and accelerometer processed by the underlying calculation. A simple operation is required to connect our products to your system and obtain IMU data without the 15-pin plug provided by our company. At the same time, the size and weight of our products can be significantly reduced by removing the base plate housing. Features Size: 40*40*42(with shell)/27*26*34(without shell and baseboard) Weight: 80g(with shell)/ 40g(without shell and baseboard) OEM modular design, strong applicability -40~80°C temperature compensation The product is low-cost Gyro bias instability: 1deg/hr Gyro bias stability (10s 1σ): 4deg/hr Gyro angular random walk: 0.2 °/√h Accelerometer bias repeatability: 100ug Accelerometer bias stability (10s) (1σ): <50ug Accelerometer class II non-linearity coefficient: <100ug/g² Application Robotic control & orientation in autonomous machines, unmanned vehicles Azimuth, attitude, position measuring and keeping in GNSS-assisted INS Pitch, roll measuring in AHRS for UAV Motion survey and keeping in MRU Attitude & azimuth keeping, positioning in IMU Guidance, navigation, control in tactical MEMS system Whatsapp/Wechat/Mob:8613992884879 Websit : www.ericcointernational.com E-mail : ericco001@ericcointernational
Open the catalog to page 1
ERICCO INERTIALTECNOLOGY Stabilizing & Pointing in satellite antenna, target tracking system Whatsapp/Wechat/Mob:8613992884879 Websit: www.ericcointernational.com E-mail: [email protected]
Open the catalog to page 2
ERICCO INERTIAL TECNOLOGY Product composition and working principle The product is mainly composed of three-axis MEMS accelerometer and gyroscope. The working principle is as follows: the gyroscope and accelerometer data are collected by ARM microcontroller, three high-precision gyroscopes are collected by 1-channel digital interface SPI, and three accelerometers are collected by another 1-channel digital interface SPI. All sensors are calibrated and compensated in software after acquisition. Product technical characteristics a) The product is designed for miniaturization and low power consumption;...
Open the catalog to page 3
ERICCO INERTIALTECNOLOGY Table 1 Pin definition of MIMU high precision inertial measurement unit Whatsapp/Wechat/Mob:8613992884879 Websit: www.ericcointernational.com E-mail: [email protected]
Open the catalog to page 4
ERICCO INERTIALTECNOLOGY The user installs the test interface on the computer,open xInsConnect.exe, as shown below. Click "COMCFG" to configure the baud rate of RS422 serial port, which is the COM port required; Click the "Open" button to open the RS422 communication interface and power on the IMU. The Angle data of X,Y,Z gyro "GX,GY,GZ", the data of X,Y,Z accelerometer "ACCX,ACCY,ACCZ" will be displayed on the interface. The temperature data of IMU will be displayed in the "TX" box. Click "CAL" box to set the data update rate of the interface to 100. The "Counter" box displays the frame serial...
Open the catalog to page 5
ERICCO INERTIALTECNOLOGY CQMCFG Open Close 1 installation error description Internal orthogonal compensation has been carried out for the whole product. If the platform used by the product cannot guarantee the accuracy of the benchmark after installation, please compensate the installation error accordingly. When the product is installed, it should be tightly installed parallel to the base level of the carrier installation (the installation error with the base level should be less than 0.05°). Because the product is a precision test instrument, although there is a shell protection, in order to...
Open the catalog to page 6All SHAANXI ERICCO INERTIAL TECH. CO., LTD catalogs and technical brochures
 ER-2MA-5
ER-2MA-52 Pages
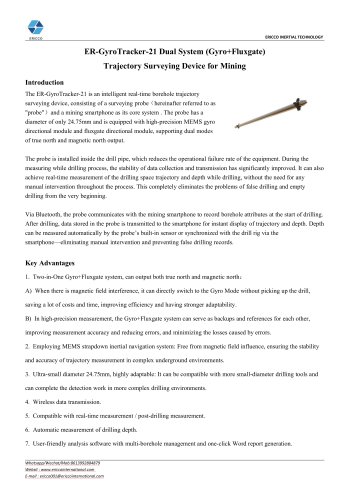 ER-GyroTracker-21
ER-GyroTracker-213 Pages
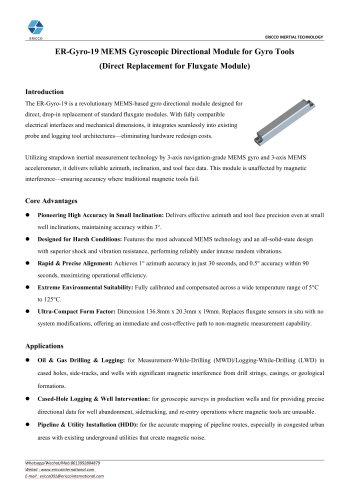 ER-Gyro-19
ER-Gyro-195 Pages
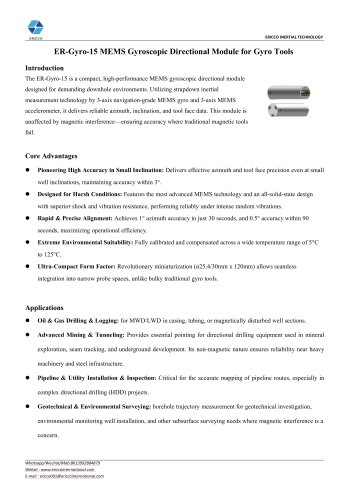 ER-Gyro-15
ER-Gyro-155 Pages
 ER-MNS-09
ER-MNS-098 Pages
 ER-FNS-02
ER-FNS-023 Pages
 ER-MNS-18
ER-MNS-187 Pages
 ER-MNS-10A
ER-MNS-10A9 Pages
 ER-MNS-06A
ER-MNS-06A7 Pages
 ER-MNS-05C
ER-MNS-05C8 Pages
 ER-MNS-05A
ER-MNS-05A8 Pages
 ER-MNS-04C
ER-MNS-04C8 Pages
 ER-MNS-04A/B
ER-MNS-04A/B8 Pages
 ER-MIMU-104
ER-MIMU-1047 Pages
 ER-MIMU-103
ER-MIMU-1038 Pages
 ER-MIMU-102
ER-MIMU-1026 Pages
 ER-MIMU-101
ER-MIMU-1016 Pages
 ER-MIMU-094
ER-MIMU-0947 Pages
 ER-MIMU-093
ER-MIMU-0937 Pages
 ER-MIMU-092
ER-MIMU-0927 Pages
 ER-MIMU-091
ER-MIMU-0918 Pages
 ER-MIMU-064
ER-MIMU-0646 Pages
 ER-MIMU-063
ER-MIMU-0637 Pages
 ER-MIMU-062
ER-MIMU-0627 Pages
 ER-MIMU-061
ER-MIMU-0616 Pages
 ER-MIMU-054
ER-MIMU-0546 Pages
 ER-MIMU-053
ER-MIMU-0536 Pages
 ER-MIMU-052
ER-MIMU-0526 Pages
 ER-MIMU-051
ER-MIMU-0516 Pages
 ER-MIMU-043
ER-MIMU-0436 Pages
 ER-MIMU-042
ER-MIMU-0426 Pages
 ER-MIMU-041
ER-MIMU-0416 Pages
 ER-3MG-104
ER-3MG-1045 Pages
 ER-3MG-103
ER-3MG-1035 Pages
 ER-3MG-102
ER-3MG-1025 Pages
 ER-3MG-101
ER-3MG-1015 Pages
 ER-3MG-094
ER-3MG-0944 Pages
 ER-3MG-093
ER-3MG-0934 Pages
 ER-3MG-092
ER-3MG-0924 Pages
 ER-3MG-091
ER-3MG-0914 Pages
 ER-3MG-064
ER-3MG-0644 Pages
 ER-3MG-063
ER-3MG-0634 Pages
 ER-3MG-062
ER-3MG-0624 Pages
 ER-3MG-061
ER-3MG-0614 Pages
 ER-3MG-054
ER-3MG-0544 Pages
 ER-3MG-053
ER-3MG-0534 Pages
 ER-3MG-052
ER-3MG-0524 Pages
 ER-3MG-051
ER-3MG-0514 Pages
 ER-3MG-044
ER-3MG-0444 Pages
 ER-3MG-043
ER-3MG-0434 Pages
 ER-3MG-042
ER-3MG-0424 Pages
 ER-3MG-041
ER-3MG-0414 Pages
 ER-2MG-104
ER-2MG-1044 Pages
 ER-2MG-103
ER-2MG-1034 Pages
 ER-2MG-102
ER-2MG-1024 Pages
 ER-2MG-101
ER-2MG-1014 Pages
 ER-2MG-094
ER-2MG-0944 Pages
 ER-2MG-093
ER-2MG-0934 Pages
 ER-2MG-092
ER-2MG-0924 Pages
 ER-2MG-064
ER-2MG-0644 Pages
 ER-2MG-091
ER-2MG-0914 Pages
 ER-2MG-063
ER-2MG-0634 Pages
 ER-2MG-062
ER-2MG-0624 Pages
 ER-2MG-061
ER-2MG-0614 Pages
 ER-2MG-054
ER-2MG-0544 Pages
 ER-2MG-053
ER-2MG-0534 Pages
 ER-2MG-052
ER-2MG-0524 Pages
 ER-2MG-051
ER-2MG-0514 Pages
 ER-2MG-044
ER-2MG-0444 Pages
 ER-2MG-043
ER-2MG-0434 Pages
 ER-2MG-042
ER-2MG-0424 Pages
 ER-2MG-041
ER-2MG-0414 Pages
 ER-GNSS/MINS-07
ER-GNSS/MINS-073 Pages
 ER-FNS-01D
ER-FNS-01D3 Pages
 ER-MIMU-184
ER-MIMU-1843 Pages
 ER-MIMU-183
ER-MIMU-1833 Pages
 ER-MIMU-182
ER-MIMU-1823 Pages
 ER-MIMU-181
ER-MIMU-1813 Pages
 ER-EC-395
ER-EC-3953 Pages
 ER-EC-385CAN
ER-EC-385CAN3 Pages
 ER-EC-385
ER-EC-3853 Pages
 ER-EC-380
ER-EC-3804 Pages
 ER-EC-365V
ER-EC-365V4 Pages
 ER-EC-365A
ER-EC-365A3 Pages
 ER-EC-365B
ER-EC-365B3 Pages
 ER-EC-360V
ER-EC-360V3 Pages
 ER-EC-360B
ER-EC-360B3 Pages
 ER-EC-360A
ER-EC-360A3 Pages
 ER-EC-345
ER-EC-3453 Pages
 ER-EC-340
ER-EC-3403 Pages
 ER-EC-230
ER-EC-2303 Pages
 ER-EC-225CAN
ER-EC-225CAN3 Pages
 ER-EC-225
ER-EC-2253 Pages
 ER-EC-220
ER-EC-2203 Pages
 ER-FINS-50
ER-FINS-504 Pages
 ER-FINS-40
ER-FINS-404 Pages
 ER-FINS-70
ER-FINS-703 Pages
 ER-FIMU-70
ER-FIMU-702 Pages
 ER-FIMU-60
ER-FIMU-602 Pages
 ER-FIMU-50
ER-FIMU-504 Pages
 ER-FIMU-40
ER-FIMU-402 Pages
 ER-FOG-910
ER-FOG-9102 Pages
 ER-FOG-851
ER-FOG-8512 Pages
 ER-FOG-70
ER-FOG-702 Pages
 ER-FOG-60
ER-FOG-602 Pages
 ER-FOG-25
ER-FOG-251 Page
 ER-FOG-50
ER-FOG-502 Pages
 ER-GNSSMINS-05
ER-GNSSMINS-0510 Pages
 ER-GNSSMINS-03
ER-GNSSMINS-0310 Pages
 ER-GNSSMINS-01
ER-GNSSMINS-0110 Pages
 ER-MIMU-M02
ER-MIMU-M029 Pages
 ER-MIMU-M01C
ER-MIMU-M01C3 Pages
 ER-MIMU-M01B
ER-MIMU-M01B3 Pages
 ER-MIMU-M01A
ER-MIMU-M01A2 Pages
 ER-MIMU-02
ER-MIMU-026 Pages
 ER-MIMU-01
ER-MIMU-016 Pages
 ER-3QA-02E
ER-3QA-02E2 Pages
 ER-QA-02C
ER-QA-02C2 Pages
 ER-QA-02B
ER-QA-02B2 Pages
 ER-QA-02A
ER-QA-02A2 Pages
 ER-QA-01C
ER-QA-01C2 Pages
 ER-QA-01B
ER-QA-01B2 Pages
 ER-QA-01A
ER-QA-01A2 Pages
 ER-QA-03F
ER-QA-03F2 Pages
 ER-QA-03E
ER-QA-03E2 Pages
 ER-QA-03D
ER-QA-03D2 Pages
 ER-QA-03C
ER-QA-03C3 Pages
 ER-QA-03B
ER-QA-03B2 Pages
 ER-QA-03A
ER-QA-03A2 Pages
 ER-MA-6
ER-MA-63 Pages
 ER-MA-5
ER-MA-52 Pages
 ER-FNS-03
ER-FNS-032 Pages
 ER-FNS-01
ER-FNS-012 Pages
 ER-MG-056
ER-MG-0562 Pages
 ER-MG-057
ER-MG-0572 Pages
 ER-MG-067
ER-MG-0672 Pages
 ER-MG-068
ER-MG-0682 Pages
 ER-MG-069
ER-MG-0692 Pages
 ER-MG2-400
ER-MG2-4003 Pages
 ER-MG2-300
ER-MG2-3003 Pages
 ER-MG2-022
ER-MG2-0222 Pages
 ER-MG2-200
ER-MG2-2003 Pages
 ER-MG2-100
ER-MG2-1003 Pages
 ER-MG2-50
ER-MG2-503 Pages
- Measuring machine
- Single-axis accelerometer
- Automatic measurement system
- Triaxial acceleration sensor
- Compact accelerometer
- High-precision measurement system
- Acceleration sensor with analog output
- Industrial accelerometer
- Distance measurement system
- Accelerometer with built-in electronics
- Rugged accelerometer
- Miniature accelerometer
- Alignment system
- Accelerometer with TEDS
- Low-noise accelerometer
- GNSS inertial navigation system