- Catalogs
- Roboception GmbH
- rc_visard NG Vision Platform
rc_visard NG Vision Platform
1 /2Pages

rc_visard NG Vision Platform
1 /2Pages
Catalog excerpts

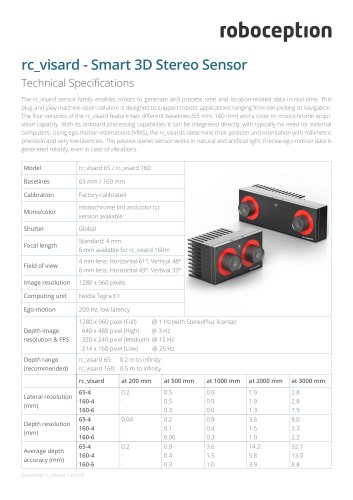
The rc_visard NG combines the high-performance rc_reason software suite with the UserSpace, which allows users to deploy their own software in Docker containers - directly on the sensor. This smart vision platform is powered by the high-performance NVIDIA® Jetson Orin™ series, the most advanced embedded AI solution for robot vision on the market today. Designed to perform most powerfully and power-efficiently, this small AI computer is housed directly in the sensor hardware, making the rc_visard NG smarter than ever! Depth image resolution & FPS with minimum distance of 0.5 m Depth image resolution & FPS with minimum distance of 1.2 m 720 x 540 pixel (High) @ 7 Hz (latency: 230 ms) 360 x 270 pixel (Medium) @ 25 Hz (latency: 70 ms) 1440 x 1080 pixel (Full) @ 3 Hz (latency: 530 ms) 720 x 540 pixel (High) @ 16 Hz (latency: 170 ms) 360 x 270 pixel (Medium) @ 25 Hz (latency: 70 ms) 240 mm x 300 mm @ 500 mm distance 640 mm x 600 mm @ 1000 mm distance 1440 mm x 1200 mm @ 2000 mm distance 2240 mm x 1800 mm @ 3000 mm distance Average depth accuracy 500 mm | 0.2 mm 1000 mm | 0.9 mm 2000 mm | 3.5 mm 3000 mm | 7.8 mm Interface & applications GenICam (via SGM®Producer software library GenTL) Rest-API, gRPC (can also be used within the onboard UserSpace)
Open the catalog to page 1
roboception Connectors We recommend to use the plug-and-produce software modules of the rc_reason suite for taking full advantage of this sensor's capabilities froboception.com/rc reason). All rc_reason modules have (with standard parameters) a latency of less than 0.5 s on the rc visard NG. Find more information on Roboception GmbH Kaflerstrasse 2 81241 Munich Germany
Open the catalog to page 2All Roboception GmbH catalogs and technical brochures
- Automation software solution
- Process software
- Computer-aided design software
- Cloud-based software
- Interface software
- Visualization software solution
- Machine software
- Creation software
- Vision system
- Machine learning software
- Industrial vision system
- Machine vision system
- 3D vision system
- Automation vision system
- Robot vision system
- Machine vision vision system
- AI vision system