IT3402C Triple Channel Rotary Encoder Kit

IT3402C Triple Channel Rotary Encoder Kit
The IT3402C is a highly miniaturized triple channel rotary encoder kit featuring differential inductive sensing, making it robust against magnetic interference, oil, water, dust, and particles. It is ultra-thin, with a total thickness of less than 2 mm, and is available with optional cable, connector, and holder.
Applications
This encoder is suitable for use in brushed and brushless motors, industrial, laboratory, and office automation, rotary stages, robotics, and assembly equipment.
Key Specifications
- Output format: A and B in quadrature + Index
- Resolution: 256 – 1,474,560 CPR
- Maximum speed: up to 8,600 RPM
- Airgap: up to 0.6 mm
- Supply: 5 V, 30 mA
- Temperature range: -40 to 125°C
- Codewheel diameters: 28, 53, or 73 mm
Technical Details
The encoder kit includes an encoder and a codewheel. The encoder provides incremental A and B output signals in quadrature and an Index signal. The resolution and maximum speed are user-programmable or can be pre-programmed. The codewheel is a PCB with passive copper strips and can be mounted using a hub and rim for accurate positioning.
Encoder Holders
Various holder options are available, including type A, which can be mounted using four screw-holes, and type B, which uses half-holes and alignment pins for positioning.
Electrical Characteristics
- Supply voltage: 4.5 to 5.5 V
- Operating frequency: up to 1000 kHz
- High level output voltage: VDD–0.5 V
- Low level output voltage: 0.5 V
Encoding Characteristics
Includes parameters such as pulse width error, state width error, and phase shift error, with options for linearization using a Look-Up Table (LUT).
Ordering Information
The product can be customized using an ordering code that specifies orientation, maximum speed, resolution, LUT, codewheel, encoder holder, cable, and connector options.
Legal and Safety Information
The document includes standard legal disclaimers regarding the accuracy of information, liability, and restrictions on use in life-support applications.
Catalog excerpts

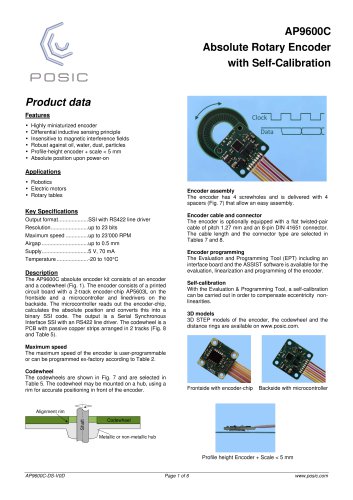
IT3402C Triple Channel Rotary Encoder Kit Product data Features • Highly miniaturized encoder • Differential inductive sensing principle • Insensitive to magnetic interference fields • Robust against oil, water, dust, particles • Ultra-thin encoder and codewheel (total < 2 mm) • Optional with cable, connector and holder Applications • Brushed and brushless motors • Industrial / laboratory / office automation • Rotary stages • Robotics, assembly equipment Key Specifications Description The IT3402C incremental encoder kit consists of an encoder and a codewheel (Fig. 1). The encoder consists of two integrated circuits in a PCB housing. It provides incremental A and B output signals in quadrature and an Index signal, which is synchronous to A and B (Fig. 2). The codewheel is a PCB with passive copper strips. Resolution, maximum speed and airgap The resolution and the maximum speed of the encoder are user-programmable or can be programmed ex-factory. The resolution depends on a filter setting that limits the maximum speed of the encoder vs. the codewheel. The resolution also depends on the maximum distance between the encoder and the codewheel. Tables 2 and 3 allow the configuration of resolution and maximum speed for a certain maximum air-gap. Codewheel The codewheel is shown in Fig. 4 and is selected in Table 5. The codewheel may be mounted on a hub, using a rim for accurate positioning in front of the encoder. Encoder holders Different encoder holder options are available and can be selected in Table 6. The encoder holder type A (Fig. 5) may be mounted on any substrate using 4 screw-holes. It has a strain relief for the cable. The encoder holder type B (Fig. 3) may be mounted on any substrate. Use half-holes on encoder PCB housing and alignment pins for accurate positioning. The encoder without holder may be mounted on non-metallic substrates. Use half-holes on encoder housing and alignment pins for accurate positioning. Encoder cable and connector The encoder is supplied with a flat cable of pitch 1.27 mm and a connector (Fig. 6). The cable type and length and the connector type are selected in Tables 7 and 8. 3D models of encoder, holders and codewheels STEP and IGES 3D models available on www.posic.com.
Open the catalog to page 1
Specifications Recommended Operating Conditions Linearity For high-resolution high-precision applications, it is possible to linearize the encoder by means of a Look-Up Table (LUT) that is located inside the encoder. The LUT can be programmed in volatile or in non-volatile memory by means of the Evaluation and Programming Tool (EPT) or it can be pre-programmed ex-factory. The LUT option is selected in Table 4. Definitions Airgap Cycle CPP °e Phase shift O Fig. 2 Encoder output signals A and B in quadrature and Index. Distance between encoder and codewheel in Z-direction. See Fig. 1. One A quad...
Open the catalog to page 2
Dimensions of IT3402 encoder on encoder-holder type B. The “Encoder center” must be centered with respect to the “Readout radius” of the Codewheel (Fig 4) Codewheel type * Readout Radius = position of Encoder Center (Fig. 3) Codewheel thickness 0.73 mm +/- 10%
Open the catalog to page 3
BB Maximum speed Table 2 D Look-Up Table Table 4 EEEEE Codewheel Table 5 F Encoder holder Table 6 Table 1: Orientation. Arrows indicate direction of move ment of codewheel with rising edge A prior to B. Table 2: Maximum speed *Max speed valid at 25°C, temp. derating in specs, page 2. Lower Max speed leads to a lower jitter of the A/B outputs. * Connector temperature range -20 to +100°C © Copyright 2019 POSIC. All rights reserved. No part of this document may be reproduced without the prior written consent of POSIC. Products and companies mentioned in this document may be trademarks or registered...
Open the catalog to page 4All POSIC catalogs and technical brochures
 RSB001 RS422 Interface Board
RSB001 RS422 Interface Board4 Pages
 RSB001 - RS-4022 Driver
RSB001 - RS-4022 Driver4 Pages



















Archived catalogs



- Incremental rotary encoder
- Absolute rotary encoder
- Hollow-shaft rotary encoder
- Magnetic rotary encoder
- Industrial rotary encoder
- Compact rotary encoder
- Linear encoder
- Single-turn rotary encoder
- Ultra-rugged rotary encoder
- SSI angular encoder
- Digital rotary encoder
- High-resolution rotary encoder
- Incremental linear encoder
- Mechanical rotary encoder
- Miniature rotary encoder
- Magnetic linear encoder
- RS-422 rotary encoder
- Motor rotary encoder