- Catalogs
- NITTOSEIKO CO., LTD.
- Screw Driving Robots 「SR580Yθ‐Z」
- Company
- Products
- Catalogs
- News & Trends
- Exhibitions
Screw Driving Robots 「SR580Yθ‐Z」
1 /2Pages
Screw Driving Robots 「SR580Yθ‐Z」
1 /2Pages
Catalog excerpts

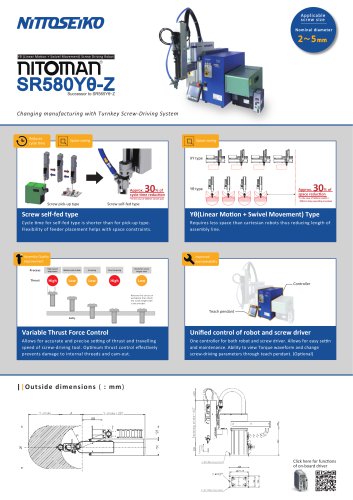
Yθ (Linear Motion + Swivel Movement) Screw Driving Robot R Changing manufacturing with Turnkey Screw-Driving System Reduces cycle time Approx. % of cycle time reduction Approx. % of space reduction *In the case of 500mm width x 200mm deep operating envelope *In the case of 100mm stroke spec Screw pick-up type Screw self-fed type Screw self-fed type Yθ(Linear Motion + Swivel Movement) Type Cycle time for self-fed type is shorter than for pick-up type. Flexibility of feeder placement helps with space constraints. Requires less space than cartesian robots thus reducing length of assembly line. Assembly Quality improvement Improved maintainability High-speed depression Before touch to hole Check for screw height fault Release the stress on workpiece then check the screw height with z-axis encoder. Teach pendant Softly Variable Thrust Force Control Unified control of robot and screw driver Allows for accurate and precise setting of thrust and travelling speed of screw-driving tool. Optimum thrust control effectively prevents damage to internal threads and cam-out. One controller for both robot and screw driver. Allows for easy settin and maintenance. Ability to view Torque waveform and change screw-driving parameters through teach pendant. (Optional) Fastening stroke Click here for functions of on-b
Open the catalog to page 1
cycle time reduction *Excludes screw-feeding and tightening time Arch motion Reduces cycle time by Arch-motion when robot returns to the ready position. 2-Stage motion avoids interference between screw guide and workpiece for products with steps or obstructions. Increased configurable tightening positions and screw-driving parameters. Ideal for applications with various products and numerous screw-driving positions. Ability to save error history in CSV format With former system, ability to see error history only available on teach pendent; however with new system, error history can be saved in...
Open the catalog to page 2All NITTOSEIKO CO., LTD. catalogs and technical brochures
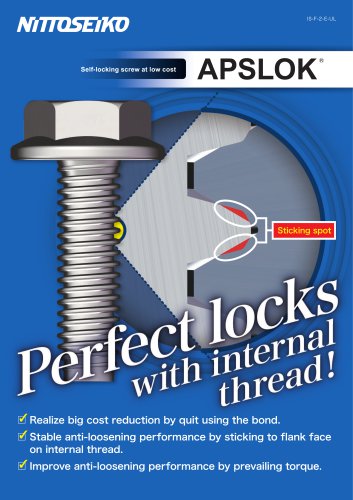 Metal screw APSLOK
Metal screw APSLOK2 Pages
 Mass flow meter
Mass flow meter2 Pages
 Screw Driving motors
Screw Driving motors8 Pages
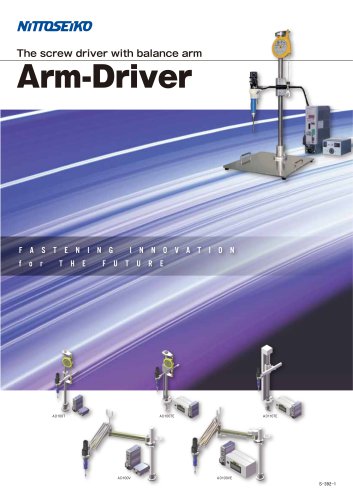 Balance Arm Type
Balance Arm Type6 Pages
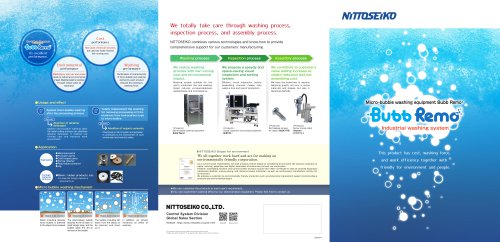 Micro-bubble Washer
Micro-bubble Washer2 Pages
 FlowMeter「PRODUCTS GUIDE」
FlowMeter「PRODUCTS GUIDE」12 Pages
 Special Heads 「LAMIMATE」
Special Heads 「LAMIMATE」2 Pages
 Special Heads 「LAMIX」
Special Heads 「LAMIX」2 Pages
 Waterproof Screw 「ASFA WP」
Waterproof Screw 「ASFA WP」2 Pages












- Servo-motor
- Water cleaning system
- Steel screw
- AC servo-motor
- High-performance servo motor
- Process cleaning system
- Screwdriver
- Parts cleaning system
- Upset-head screw
- Fastening screw
- Mounting machine
- Screw with hexagonal head
- Automated feeder
- Ultra-compact servomotor
- Pin
- Automatic assembling machine
- Metal pin
- Frearson screw