- Catalogs
- Motion Index Drives, Inc.
- RTX Rotary Index Tables
RTX Rotary Index Tables
1 /20Pages
RTX Rotary Index Tables
1 /20Pages
Catalog excerpts

* Dimensions depend on the used drive
Open the catalog to page 2
Fitting position Load on output flange Load on central column Torque on output flange [Nm] 10 Axial runout on the output flange 0 [mm] * Increased indexing accuracy accessible through selected components From division 16, the division error due to multi-point locks on the drive cam is larger by a factor of 1.5“ Combined loads and possible process forces must be confirmed by Motion Index Drives. Standard drive Motor size
Open the catalog to page 3
Load table RTX350 n = Number of stops / 360° revolution of output flange t = Step time in [s] JMax = Mass moment of inertia (base plate + fixtures and parts) in [Kgm2] Without motor and lifetime JL = Mass moment of inertia by life time (base plate + fixtures and parts) in [Kgm2] J = Mass moment of inertia with motor (base plate + fixtures and parts) in [Kgm2] From n=16 The output flange steps 2 times per cam revolution From n=36 The output flange steps 3 times per cam revolution
Open the catalog to page 4
* Dimensions depend on the used drive
Open the catalog to page 5
Fitting position Load on output flange Radial force F,a [N] 17.5 Axial force F3a [kN] 20 Torque on output flange [Nm] 322 Load on central column Precision Axial runout on the output flange 0 [mm] * Increased indexing accuracy accessible through selected components From division 16, the division error due to multi-point locks on the drive cam is larger by a factor of 1.5“ Axial force FaM [kN] 18 Torque on output flange [Nm] 77 Combined loads and possible process forces must be confirmed by Motion Index Drives. Standard drive Output flange 0 Motor size
Open the catalog to page 6
Load table RTX450 n = Number of stops / 360° revolution of output flange t = Step time in [s] JMax = Mass moment of inertia (base plate + fixtures and parts) in [Kgm2] Without motor and lifetime JL = Mass moment of inertia by life time (base plate + fixtures and parts) in [Kgm2] J = Mass moment of inertia with motor (base plate + fixtures and parts) in [Kgm2] From n=16 The output flange steps 2 times per cam revolution From n=36 The output flange steps 3 times per cam revolution
Open the catalog to page 7
Position of the hole pattern in the output flange Stop number Further stop numbers you can find in the RTF/RTX550 dimension sheet at our website. * Dimensions depend on the used drive
Open the catalog to page 8
Fitting position Load on output flange Radial force FrA [kN] 23 Axial force FaA [N] 18.4 Torque on output Precision Axial runout on the output flange 0 [mm] * Increased indexing accuracy accessible through selected components From division 16, the division error due to multi-point locks on the drive cam is larger by a factor of 1.5“ Axial force FaM [kN] 18 Torque on output flange [Nm] 77 Combined loads and possible process forces must be confirmed by Motion Index Drives. Standard drive Output flange 0 Motor size
Open the catalog to page 9
Load table RTX550 n = Number of stops / 360° revolution of output flange t = Step time in [s] JMax = Mass moment of inertia (base plate + fixtures and parts) in [Kgm2] Without motor and lifetime JL = Mass moment of inertia by life time (base plate + fixtures and parts) in [Kgm2] J = Mass moment of inertia with motor (base plate + fixtures and parts) in [Kgm2] From n=16 The output flange steps 2 times per cam revolution From n=36 The output flange steps 3 times per cam revolution
Open the catalog to page 10
Fitting position Load on output flange Radial force FrA [kN] 20 Axial force FaA [kN] 22.5 Torque on Precision Axial runout on the output flange 0 [mm] * Increased indexing accuracy accessible through selected components From division 16, the division error due to multi-point locks on the drive cam is larger by a factor of 1.5“ Axial force FaM [kN] 14 Torque on output flange [Nm] 170 Combined loads and possible process forces must be confirmed by Motion Index Drives. Standard drive Output flange 0 Motor size
Open the catalog to page 12
Load table n = Number of stops / 360° revolution of output flange t = Step time in [s] JMax = Mass moment of inertia (base plate + fixtures and parts) in [Kgm2] Without motor and lifetime JL = Mass moment of inertia by life time (base plate + fixtures and parts) in [Kgm2] J = Mass moment of inertia with motor (base plate + fixtures and parts) in [Kgm2] From n=16 The output flange steps 2 times per cam revolution From n=36 The output flange steps 3 times per cam revolution
Open the catalog to page 13
* Dimensions depend on the used drive
Open the catalog to page 14
Fitting position Load on output flange Load on central column Axial runout on the output flange 0 [mm] Radial force FrM [kN] 3.8 Axial force FaM [kN] 15 Torque on output * Increased indexing accuracy accessible through selected components From division 16, the division error due to multi-point locks on the drive cam is larger by a factor of 1.5" Standard drive Motor size
Open the catalog to page 15
Load table RTX750 n = Number of stops / 360° revolution of output flange t = Step time in [s] JMax = Mass moment of inertia (base plate + fixtures and parts) in [Kgm2] Without motor and lifetime JL = Mass moment of inertia by life time (base plate + fixtures and parts) in [Kgm2] J = Mass moment of inertia with motor (base plate + fixtures and parts) in [Kgm2] From n=16 The output flange steps 2 times per cam revolution From n=36 The output flange steps 3 times per cam revolution
Open the catalog to page 16
* Dimensions depend on the used drive
Open the catalog to page 17
Fitting position Load on output flange Load on central column Axial runout on the output flange 0 [mm] * Increased indexing accuracy accessible through selected components From division 16, the division error due to multi-point locks on the drive cam is larger by a factor of 1.5“ Axial force FaM [kN] 25 Torque on output flange [Nm] 450 Combined loads and possible process forces must be confirmed by Motion Index Drives. Standard drive Output flange 0 Motor size
Open the catalog to page 18
Load table RTX900 n = Number of stops / 360° revolution of output flange t = Step time in [s] JMax = Mass moment of inertia (base plate + fixtures and parts) in [Kgm2] Without motor and lifetime JL = Mass moment of inertia by life time (base plate + fixtures and parts) in [Kgm2] J = Mass moment of inertia with motor (base plate + fixtures and parts) in [Kgm2] From n=16 The output flange steps 2 times per cam revolution From n=36 The output flange steps 3 times per cam revolution
Open the catalog to page 19All Motion Index Drives, Inc. catalogs and technical brochures
 RTF Rotary Index Tables
RTF Rotary Index Tables13 Pages
 TSR Series
TSR Series13 Pages
 TT315 Series
TT315 Series7 Pages
 RT Series Rotary Index Table
RT Series Rotary Index Table14 Pages
 Precision Link Conveyor
Precision Link Conveyor12 Pages
 Weld Positioner
Weld Positioner5 Pages
 TMF Series Rotary Index Table
TMF Series Rotary Index Table15 Pages
 XP Series
XP Series23 Pages
 Pick and Place
Pick and Place5 Pages
 Product Catalog
Product Catalog152 Pages
 MX150 Slip Ring Brochure
MX150 Slip Ring Brochure2 Pages
 MX470 Slip Ring Brochure
MX470 Slip Ring Brochure3 Pages
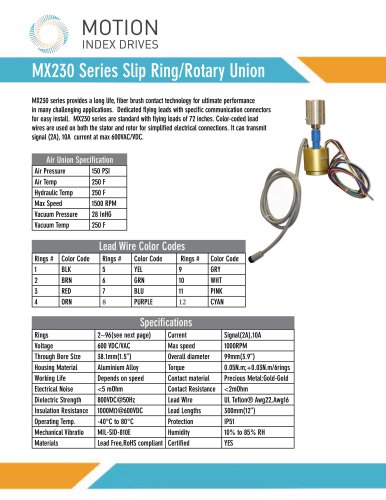 MX230 Slip Ring Brochure
MX230 Slip Ring Brochure2 Pages
- Rail conveyor
- Transport rail conveyor
- Horizontal conveyor
- Rotary joint
- Multi-port rotary union
- Electric drive conveyor
- Chain conveyor
- Work conveyor
- Oil rotary distributor
- Positioner
- Feed conveyor
- Transfer conveyor
- Conveyor for the pharmaceutical industry
- Mobile conveyor
- Rotary indexing table
- Flexible conveyor
- Assembly line conveyor
- Electric positioner
- Pick-and-place machine
- Electric rotary indexing table