- Catalogs
- MICRO-CONTROLE / Spectra-Physics
- HXP100 Hexapod
HXP100 Hexapod

HXP100 Hexapod
The HXP100 Hexapod is a six-axis parallel kinematic positioning system designed by Newport. It offers six degrees of freedom: X, Y, Z, pitch, roll, and yaw, making it suitable for complex motion applications requiring high load capacity and precision.
Specifications
- Dimensions: Ø 300 mm x H 200 mm
- Travel Range: X, Y ±25 mm; Z ±14 mm; Θx, Θy ±11°; Θz ±19°
- Minimum Incremental Motion: X, Y, Z 0.5 µm; Θx, Θy, Θz 5 µrad
- Repeatability: X, Y, Z 0.5 µm; Θx, Θy, Θz 0.001° (17 µrad)
- Max Speed: 1 mm/s
- Load Capacity: 200 N
- Rigidity (Z): 40 N/µm
Features
- Integrated 6-axis positioner with no moving cables
- High stiffness, particularly in the Z-axis
- Virtual center of rotation set by software
- Advanced controller (HXP100-ELEC) with features like instrument-grade I/Os, high-speed data acquisition, and integrated TCL programming
- Capability to relocate the pivot point and coordinate system
Applications
- Optics and satellite assembly and testing
- AED simulation
- Astronomy
- Biotechnology and surgery
- X-Ray diffraction
- Micromachining and micro-manipulation
Design and Engineering
The Hexapod is driven by six enhanced DC servo motor-driven LTA actuators. It features unique anti-friction coated spherical joints for higher rigidity and load capacity compared to similar-sized Hexapods.
Controller Capabilities
The HXP100-ELEC controller facilitates synchronized transformations from Cartesian coordinates to Hexapod leg motions. It supports virtual pivot points and user-definable coordinate systems, enhancing ease of use and precision.
Contact Information
Newport Corporation provides global support with offices in various countries, ensuring compliance with ISO 9001 standards.
Ordering Information
- Model: HXP100-MECA (Hexapod), HXP100-ELEC (Controller)
Catalog excerpts

HXP100 Hexapod 6 - A X I S - P A R A L L E L K I N E M A T I C P O S I T I O N I N G S Y S T E M A Hexapod is a parallel kinematic motion device that provides six degrees of freedom: X, Y, Z, pitch, roll, and yaw. Hexapods are well known as effective solutions to complex motion applications that demand high load capacity and accuracy in up to six independent axes. Yet, they still have the image of being complex and highly priced. Now, Newport is the first company to introduce a Hexapod that is not only affordable but extremely easy to use. The Newport Hexapod is driven by six enhanced versions of our industry-proven, high performance DC servo motor driven LTA actuators. The quality of the actuators has obviously a strong impact on the overall motion performance of a Hexapod, but of almost equal importance are the joints with which the actuators are attached to the base and the moving top plate. Embracing this challenge, our engineers came up with a unique design of special anti-friction coated spherical joints that are not only simple, but also provide significant higher rigidity than ordinary universal joints. The result is a Newport Hexapod that provides more than five-times higher rigidity and twice the load capacity of other Hexapods of similar size. The Newport Hexapod is supplied with a specific HXP100-ELEC controller. This controller accurately masters the synchronized transformations from Cartesian input coordinates to the motion of the Hexapod legs. In addition, the HXP100-ELEC also provides advanced features including instrument grade I/O's, hardware based input triggers, event triggers, high-speed on-the-fly data acquisition, fast TCP/IP communication, and integrated TCL programming language for on-board processes. All these features improve accuracy and throughput, making the programmer’s life much easier. A common requirement for many Hexapod motion applications is a virtual pivot point, allowing the user to freely choose the point in space that is a pivot point for all rotations. The Hexapod controller provides this as a standard feature and at Newport, we have taken this a step further. The Newport Hexapod can not only relocate the pivot point, but through our advanced technology, the entire coordinate system can be relocated. In addition, two user-definable coordinate systems are provided, called tool (moves with the Hexapod) and work (stationary coordinate systems). Incremental displacements are possible in either one of these systems in user-friendly Cartesian coordinates, and positions can be easily calculated from one system to the other by a function call. These powerful functions provide a completely new way of mastering Hexapod motions without the need for complex external coordinate transformations. • Integrated 6-axis positioner • Light, compact and low-profile • No moving cables • High stiffness (particular in z) • No accumulation of motion errors • Virtual center of rotation, set by software A P P L I C A T I O N S • Optics and satellite assembly and testing • AED simulation • Astronomy • Biotechnology, surgery • X-Ray diffraction • Micromachining, micro-manipulation
Open the catalog to page 1
HXP100_DSE (01/10) PHONE EMAIL Belgium +32-(0)0800-11 257 [email protected] China +86-10-6267-0065 [email protected] France +33-(0)1-60-91-68-68 [email protected] Japan +81-3-3794-5511 [email protected] Taiwan +886 -(0)2-2508-4977 [email protected] PHONE EMAIL Santa Clara, USA +1-800-775-5273 [email protected] Netherlands +31-(0)30 6592111 [email protected] United Kingdom +44-1235-432-710 [email protected] Germany / Austria / Switzerland +49-(0)6151-708-0 [email protected] Newport Corporation, Irvine, California and Franklin, Massachusetts; Evry and Beaune-La-Rolande,...
Open the catalog to page 2All MICRO-CONTROLE / Spectra-Physics catalogs and technical brochures
 Precision Motion Control
Precision Motion Control27 Pages
 OPTICAL FIBER ALIGNMENT
OPTICAL FIBER ALIGNMENT6 Pages
 SA2_90028936F
SA2_90028936F1 Page
 10BPF10-370_ROHS
10BPF10-370_ROHS1 Page
 10BPF10-320_ROHS
10BPF10-320_ROHS1 Page
 10BPF10-310
10BPF10-3101 Page
 M-401
M-4011 Page
 Tunable Diode Lasers
Tunable Diode Lasers16 Pages
 Custom Component Solutions
Custom Component Solutions6 Pages
 Vision IsoStation Brochure
Vision IsoStation Brochure5 Pages
 Nanopositioning Solutions
Nanopositioning Solutions55 Pages
 newport ressource
newport ressource1640 Pages
 Motion PL30
Motion PL3024 Pages
 CONEX-AG-LS25-27P
CONEX-AG-LS25-27P2 Pages
 Nanopositioners
Nanopositioners40 Pages
 Prisms and retroreflectors
Prisms and retroreflectors9 Pages
 Beamsplitters
Beamsplitters34 Pages
 Spherical and aspherical lenses
Spherical and aspherical lenses35 Pages
 Optrical mirror
Optrical mirror33 Pages
 Ultra-Low Loss SuperMirrors™
Ultra-Low Loss SuperMirrors™2 Pages
 Precision Right-Angle Prisms
Precision Right-Angle Prisms1 Page
 Parallel Windows
Parallel Windows1 Page
 Sapphire Windows
Sapphire Windows1 Page
 Compensated Attenuators
Compensated Attenuators1 Page
 High-Energy Laser Beam Expanders
High-Energy Laser Beam Expanders2 Pages
 High-Energy Variable Attenuators
High-Energy Variable Attenuators3 Pages
 Laser Collimator
Laser Collimator1 Page
 Gradient Index Micro Lenses
Gradient Index Micro Lenses2 Pages
 Aspheric Condenser Lenses
Aspheric Condenser Lenses1 Page
 Molded Glass Aspheric Lenses
Molded Glass Aspheric Lenses3 Pages
 BK 7 Precision Bi-Convex Lenses
BK 7 Precision Bi-Convex Lenses2 Pages
 Polarcor™ Linear Polarizers
Polarcor™ Linear Polarizers1 Page
 Precision Linear Polarizers
Precision Linear Polarizers1 Page
 Broadband Beam Samplers
Broadband Beam Samplers1 Page
 Pellicle Beamsplitters
Pellicle Beamsplitters1 Page
 Plane Ruled Reflection Gratings
Plane Ruled Reflection Gratings2 Pages
 Volume Bragg Gratings™
Volume Bragg Gratings™1 Page
 Ultrafast Laser Beam Sampler
Ultrafast Laser Beam Sampler1 Page
 Ultrafast Laser Chirped Mirrors
Ultrafast Laser Chirped Mirrors2 Pages
 Laser Diode Objective Lenses
Laser Diode Objective Lenses1 Page
 Precision Objective Lenses
Precision Objective Lenses1 Page
 Reflective Microscope Objectives
Reflective Microscope Objectives2 Pages
 Systems Solutions brochure
Systems Solutions brochure6 Pages
 Polarization Controller, Manual
Polarization Controller, Manual2 Pages
 Fiber Optic Depolarizers
Fiber Optic Depolarizers1 Page
 Mode Scrambler
Mode Scrambler1 Page
 Index-Matching Fluid
Index-Matching Fluid1 Page
 Variable Ratio Couplers
Variable Ratio Couplers2 Pages
 Fixed Fiber Optic Attenuator
Fixed Fiber Optic Attenuator1 Page
 Fiber Optic Switches
Fiber Optic Switches2 Pages
 Single Branch Fiber Bundles
Single Branch Fiber Bundles1 Page
 Fiber Optic Isolator
Fiber Optic Isolator2 Pages
 Photonic Crystal Fibers
Photonic Crystal Fibers4 Pages
 Oriel Multi-track Fiber Bundles
Oriel Multi-track Fiber Bundles2 Pages
 Power Delivery Fibers
Power Delivery Fibers1 Page
 Liquid Light Guides
Liquid Light Guides2 Pages
 Infrared Fibers
Infrared Fibers1 Page
 Fast Steering Mirrors
Fast Steering Mirrors4 Pages
 Optical Delay Line Kit
Optical Delay Line Kit1 Page
 Long Scan Autocorrelator
Long Scan Autocorrelator1 Page
 I-V Test Station
I-V Test Station2 Pages
 Projects in Optics
Projects in Optics2 Pages
 Projects in Interferometry
Projects in Interferometry2 Pages
 Azimuth / Elevation Gimbals
Azimuth / Elevation Gimbals2 Pages
 Air-Bearing System
Air-Bearing System2 Pages
 X-Ray Diffractometer
X-Ray Diffractometer2 Pages
 Motion System
Motion System2 Pages
 LabLegs™ Upgrade Kits
LabLegs™ Upgrade Kits1 Page
 UCS Series Cleanroom Tables
UCS Series Cleanroom Tables1 Page
 TE Series Table Enclosures
TE Series Table Enclosures1 Page
 Oriel Integrating Spheres
Oriel Integrating Spheres5 Pages
 Oriel Inspection Probes
Oriel Inspection Probes1 Page
 Oriel Focusing Lens Assembly
Oriel Focusing Lens Assembly2 Pages
 Xenon Flashlamps
Xenon Flashlamps2 Pages
 Oriel InstaSpec X CCD
Oriel InstaSpec X CCD3 Pages
 Oriel Mini Monochromator
Oriel Mini Monochromator3 Pages
 Oriel 77200 1/4 m Monochromator
Oriel 77200 1/4 m Monochromator3 Pages
 OSM2 Series Spectrometers
OSM2 Series Spectrometers2 Pages
 Oriel Optical Choppers
Oriel Optical Choppers2 Pages
 Electronic Safety Shutters
Electronic Safety Shutters1 Page
 Oriel Optical Shutter
Oriel Optical Shutter1 Page
 Iris Diaphragms
Iris Diaphragms1 Page
 X26 Series Mirror Mount
X26 Series Mirror Mount1 Page
 Mini Optical Rails and Carriers
Mini Optical Rails and Carriers2 Pages
 Slotted Bases
Slotted Bases2 Pages
 SDS Series Angle Brackets
SDS Series Angle Brackets1 Page
 Rotation Adaptor
Rotation Adaptor1 Page
 PBN Series Base Plates
PBN Series Base Plates1 Page
 Modular Riser Plates
Modular Riser Plates1 Page
 Magnetic Bases
Magnetic Bases2 Pages
 Kinematic Stops and Nudgers
Kinematic Stops and Nudgers1 Page
 Kinematic Bases
Kinematic Bases2 Pages
 Fixed Height Platforms
Fixed Height Platforms1 Page
 EQ Series Angle Brackets
EQ Series Angle Brackets2 Pages
 Base Clamps
Base Clamps1 Page
 360 Series Angle Brackets
360 Series Angle Brackets1 Page
 Rod Platforms
Rod Platforms1 Page
 Rod Clamps
Rod Clamps1 Page
 Posts and Post Holders
Posts and Post Holders3 Pages
 Post Clamps and Accessories
Post Clamps and Accessories1 Page
 Pedestal-Base Post Holders
Pedestal-Base Post Holders2 Pages
 Modular Construction System
Modular Construction System1 Page
 Holders for Pedestal Posts
Holders for Pedestal Posts1 Page
 Heavy Duty Rod Systems
Heavy Duty Rod Systems2 Pages
 Dual Rod Systems
Dual Rod Systems1 Page
 Breadboard Support Posts
Breadboard Support Posts1 Page
 Pedestal Post System
Pedestal Post System2 Pages
 Motorized Filter Wheels
Motorized Filter Wheels1 Page
 Manual Filter Wheels
Manual Filter Wheels1 Page
 Indexed Filter Wheel Mounts
Indexed Filter Wheel Mounts1 Page
 Filter Holders
Filter Holders1 Page
 Filter and Optic Holders
Filter and Optic Holders1 Page
 V-Blocks
V-Blocks1 Page
 Precision Beam Steerers
Precision Beam Steerers1 Page
 Polarizer Rotation Mounts
Polarizer Rotation Mounts1 Page
 Pockels Cell Positioner
Pockels Cell Positioner1 Page
 Kin-a-Flip Mount
Kin-a-Flip Mount1 Page
 Diffraction Grating Mount
Diffraction Grating Mount2 Pages
 Cube Beamsplitter Holders
Cube Beamsplitter Holders1 Page
 Beam Steerers
Beam Steerers1 Page
 Aegis Qube™ Beam Routing System
Aegis Qube™ Beam Routing System5 Pages
 Variable Lens Holder
Variable Lens Holder1 Page
 Self-Centering Lens Mounts
Self-Centering Lens Mounts1 Page
 Multi-Axis Lens Positioners
Multi-Axis Lens Positioners4 Pages
 Lens Focusing Mount
Lens Focusing Mount1 Page
 Fixed Lens Mounts
Fixed Lens Mounts1 Page
 Cylindrical Lens Holders
Cylindrical Lens Holders1 Page
 Compact Lens Positioners
Compact Lens Positioners1 Page
 Adjustable Lens Mounts
Adjustable Lens Mounts1 Page
 UV Objective Lenses
UV Objective Lenses1 Page
 Objective Lenses
Objective Lenses1 Page
 Infrared Lenses
Infrared Lenses1 Page
 Spherical Ball Micro Lenses
Spherical Ball Micro Lenses1 Page
 Three-Axis Spatial Filters
Three-Axis Spatial Filters2 Pages
 Precision Singlet Lens Sets
Precision Singlet Lens Sets3 Pages
 OptiSet™ Optics Sets
OptiSet™ Optics Sets2 Pages
 Laser Beam Expanders
Laser Beam Expanders2 Pages
 Electronic Shutter System
Electronic Shutter System1 Page
 UV Beam Viewer
UV Beam Viewer1 Page
 Interferometer Flats
Interferometer Flats1 Page
 Light Pipe Homogenizer
Light Pipe Homogenizer1 Page
 VALUMAX® Right-Angle Prisms
VALUMAX® Right-Angle Prisms1 Page
 VALUMAX® Broadband Mirrors
VALUMAX® Broadband Mirrors2 Pages
 Laser Line Dielectric Mirrors
Laser Line Dielectric Mirrors2 Pages
 High-Energy Nd:YAG Laser Mirrors
High-Energy Nd:YAG Laser Mirrors2 Pages
 Broadband SuperMirrors™
Broadband SuperMirrors™1 Page
 Broadband Metallic Mirrors
Broadband Metallic Mirrors2 Pages
 Broadband Dielectric Mirrors
Broadband Dielectric Mirrors2 Pages
 Oriel TE Cooler Controller
Oriel TE Cooler Controller1 Page
 Oriel Current Preamplifier
Oriel Current Preamplifier1 Page
 Micro-Beam Profiler
Micro-Beam Profiler1 Page
 Laser Beam Profiler
Laser Beam Profiler2 Pages
 High-Speed Photodetectors, GHz
High-Speed Photodetectors, GHz7 Pages
 Oriel Silicon Detectors
Oriel Silicon Detectors2 Pages
 Oriel Pb and PbSe Detectors
Oriel Pb and PbSe Detectors2 Pages
 Oriel InGaAs and Ge Detectors
Oriel InGaAs and Ge Detectors2 Pages
 Oriel Photomultiplier Tubes
Oriel Photomultiplier Tubes2 Pages
 Fiber Optic Detectors
Fiber Optic Detectors2 Pages
 PulseScout Autocorrelator
PulseScout Autocorrelator2 Pages
 Heat Control Filters
Heat Control Filters1 Page
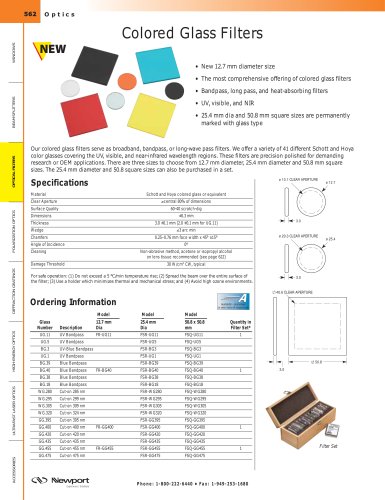 Colored Glass Filters
Colored Glass Filters3 Pages
 Bandpass Filters
Bandpass Filters4 Pages
 Laser Line Filters
Laser Line Filters2 Pages
 Short and Long-Wave Pass Filters
Short and Long-Wave Pass Filters2 Pages
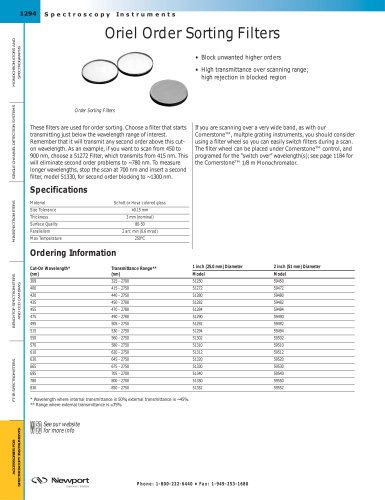 Oriel Order Sorting Filters
Oriel Order Sorting Filters1 Page
 UZ Series Vertical Linear Stages
UZ Series Vertical Linear Stages2 Pages
 BG Series Goniometric Cradles
BG Series Goniometric Cradles4 Pages
 EL/EN Series Lab Jacks
EL/EN Series Lab Jacks1 Page
 ECN/ECR Series Lab Jacks
ECN/ECR Series Lab Jacks2 Pages
 Single-Mode Fiber Couplers
Single-Mode Fiber Couplers1 Page
 Multimode Fiber Couplers
Multimode Fiber Couplers2 Pages
 GRIN Lens Fiber Couplers
GRIN Lens Fiber Couplers1 Page
 Fiber Optic Positioners
Fiber Optic Positioners3 Pages
 BM Series Micrometers
BM Series Micrometers2 Pages
 Apex Fiber Illuminators
Apex Fiber Illuminators2 Pages
 Series Q Deuterium Sources
Series Q Deuterium Sources1 Page
 Deuterium Lamps
Deuterium Lamps2 Pages
 Apex Deuterium Lamp Sources
Apex Deuterium Lamp Sources1 Page
 Oriel Ozone Eater
Oriel Ozone Eater1 Page
 Ozone Blowers
Ozone Blowers1 Page
 Flange Mounted Cells
Flange Mounted Cells1 Page
 Beam Turning Assemblies
Beam Turning Assemblies2 Pages
 Aspherab Lens Assemblies
Aspherab Lens Assemblies2 Pages
 Mounts for Beam Probes
Mounts for Beam Probes1 Page
 Input Hood for Light Sources
Input Hood for Light Sources1 Page
 Holders for Oriel Single Fibers
Holders for Oriel Single Fibers2 Pages
 Flood Exposure Sources
Flood Exposure Sources6 Pages
 Mask Alignment Tools
Mask Alignment Tools4 Pages
 Class A Solar Simulators
Class A Solar Simulators3 Pages
 150 - 300 W Solar Simulators
150 - 300 W Solar Simulators2 Pages
 150 W Low Cost Solar Simulator
150 W Low Cost Solar Simulator2 Pages
 Apex Monochromator Illuminators
Apex Monochromator Illuminators4 Pages
 Silicon Carbide Light Source
Silicon Carbide Light Source1 Page
 Quartz Tungsten Halogen Lamps
Quartz Tungsten Halogen Lamps3 Pages
 Blackbodies
Blackbodies2 Pages
 Apex Infrared Light Sources
Apex Infrared Light Sources2 Pages
 Xenon Flashlamp Systems
Xenon Flashlamp Systems2 Pages
 Uniform Illuminators
Uniform Illuminators3 Pages
 Simplicity Series Arc Sources
Simplicity Series Arc Sources2 Pages
 Series Q Lamp Housings
Series Q Lamp Housings4 Pages
 Series Q Arc Lamp Sources
Series Q Arc Lamp Sources2 Pages
 Oriel PhotoMax Lamp Housing
Oriel PhotoMax Lamp Housing3 Pages
 Fading Test System
Fading Test System1 Page
 Modular Infrared Light Sources
Modular Infrared Light Sources2 Pages
 Digital Arc Lamp Power Supplies
Digital Arc Lamp Power Supplies2 Pages
 DC Short Arc Lamps
DC Short Arc Lamps3 Pages
 Research Arc Lamp Housings
Research Arc Lamp Housings3 Pages
 Apex Arc Lamp Sources
Apex Arc Lamp Sources2 Pages
 Pencil Style Calibration Lamps
Pencil Style Calibration Lamps3 Pages
 Calibrated Sources and Services
Calibrated Sources and Services2 Pages
 Laser Diode Adaptors
Laser Diode Adaptors1 Page
 Cylindrical Laser Mounts
Cylindrical Laser Mounts1 Page
 Laser Diode Drivers, 500B Series
Laser Diode Drivers, 500B Series2 Pages
 TEC Controller, 300B Series
TEC Controller, 300B Series2 Pages
 VBG Raman Laser Modules
VBG Raman Laser Modules2 Pages
 Laser Diode Modules, LQN Series
Laser Diode Modules, LQN Series2 Pages
 Alignment Laser
Alignment Laser1 Page
 Ultraviolet Safety Equipment
Ultraviolet Safety Equipment1 Page
 Laser Safety Glasses and Goggles
Laser Safety Glasses and Goggles4 Pages
 Laser Safety Windows
Laser Safety Windows1 Page
 Infrared IR Viewer
Infrared IR Viewer1 Page
 Beam Dump
Beam Dump1 Page
 177 Air-Cooled Ion Lasers
177 Air-Cooled Ion Lasers2 Pages
 Empower ® Q-Switched Laser
Empower ® Q-Switched Laser2 Pages
 V-Xtreme™ Q-Switched Laser
V-Xtreme™ Q-Switched Laser2 Pages
 Fiber Pigtailed Laser Diode
Fiber Pigtailed Laser Diode1 Page
 488 nm CW Laser- Cyan™ OEM
488 nm CW Laser- Cyan™ OEM2 Pages
 CW Lasers- Excelsior® OEM
CW Lasers- Excelsior® OEM4 Pages
 Inspire™ OPO Family
Inspire™ OPO Family2 Pages
 Kevlar® Shears
Kevlar® Shears1 Page
 Fiber Optic Scribes
Fiber Optic Scribes1 Page
 Fiber Jacket Stripper
Fiber Jacket Stripper1 Page
 Fiber Optic Collimators
Fiber Optic Collimators2 Pages
 Fiber Preparation Kit
Fiber Preparation Kit1 Page
 Fiber Optic Splice
Fiber Optic Splice1 Page
 Fiber Coating Stripper
Fiber Coating Stripper1 Page




































































































































































































































































































































































































Archived catalogs
 Pick & Place Machine
Pick & Place Machine2 Pages
 Metrology Positioning System
Metrology Positioning System2 Pages
 Adaptors and Retaining Rings
Adaptors and Retaining Rings1 Page
 Mounting Bridles
Mounting Bridles1 Page















- Positioning table
- Translation stage
- Digital temperature control
- Motorized positioning table
- Temperature controller
- Precision positioning table
- Digital temperature controller
- Metal stand
- PID temperature control
- Single-axis positioning stage
- Power meter
- Manually-operated positioning stage
- Compact positioning table
- 2-axis positioning table
- PID temperature controller
- Glass lens element
- Optical filter
- Multi-axis positioning table
- Rotary positioning table
- Coupler