- Catalogs
- The MathWorks
- Simscape
Simscape

Simscape
- Single environment for modeling various physical systems.
- Libraries of physical modeling blocks for custom component development.
- MATLAB-based Simscape language for text-based component authoring.
- Automatic unit conversion for parameters and variables.
- Support for C-code generation for deployment in other simulation environments.
Catalog excerpts

Simscape Model and simulate multidomain physical systems Simscape™ provides an environment for modeling and simulating physical systems spanning mechanical, electrical, hydraulic, and other physical domains. It provides fundamental building blocks from these domains that you can assemble into models of physical components, such as electric motors, inverting op-amps, hydraulic valves, and ratchet mechanisms. Because Simscape components use physical connections, your models match the structure of the system you are developing. Simscape models can be used to develop control systems and test system-level performance. You can extend the libraries using the MATLAB® based Simscape language, which enables text-based authoring of physical modeling components, domains, and libraries. You can parameterize your models using MATLAB variables and expressions, and design control systems for your physical system in Simulink®. To deploy your models to other simulation environments, including hardware-in-the-loop (HIL) systems, Simscape supports C-code generation. Learn more about physical modeling. Key Features ▪ Single environment for modeling and simulating mechanical, electrical, hydraulic, thermal, and other multidomain physical systems ▪ Libraries of physical modeling blocks and mathematical elements for developing custom components ▪ MATLAB based Simscape language, enabling text-based authoring of physical modeling components, domains, and libraries ▪ Physical units for parameters and variables, with all unit conversions handled automatically ▪ Ability to simulate models that include blocks from related physical modeling products without purchasing those products ▪ Support for C-code generation Modeling a DC Motor 6:31 Model a DC motor using electrical and mechanical physical modeling components. Simscape is used to optimize system-level performance and to create plant models for control design. The models you create support your entire development process, including hardware-in-the-loop simulations.
Open the catalog to page 1
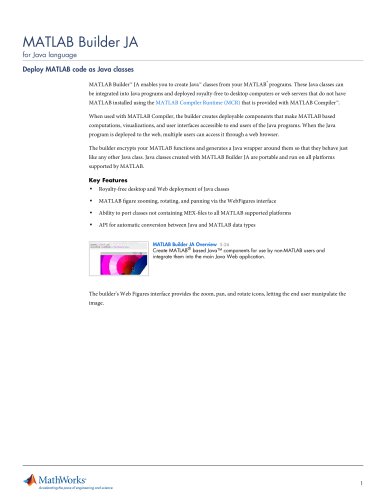
Cross-section illustration of an electrohydraulic servo-valve that uses a flapper-nozzle amplifier, highlighted in yellow (right). The colored blocks in the associated Simscape model (left) correspond to the colored arrows, which represent typical hydraulic flow paths. Physical System Modeling With Simscape, you build a model of a system just as you would assemble a physical system. Simscape employs a physical network approach, also referred to as acausal modeling, to model building: Components (blocks) corresponding to physical elements, such as pumps, motors, and op-amps, are joined by lines...
Open the catalog to page 2
Modeling a DC Motor 6:31 Model a DC motor using electrical and mechanical physical modeling components. Modeling Hydraulic Components Simscape provides hydraulic building blocks that model fundamental hydraulic effects and can be combined to create more complex hydraulic components. These blocks define the pressure/flow relationship for basic physical effects, such as fluid compressibility, fluid inertia, mechanical friction, energy transduction, and flow through basic fixed and variable orifices. You can define a fluid by entering its fluid properties. More elaborate hydraulic components are...
Open the catalog to page 3
*j Library: Bj^^/Mydraiiic/Hydraulic Element* file £ci Vn. Dnp)oy Diagram Arulysis Help * Aw.li&rjrif » 4Hy*»glK ► A HyflrsmlK EHmfntl file Ldri yj+ew fruHiy Oiagfam Hydtt-UMharatOi FUwUfll* £ne £dH K«w Q.inlay Diarj;ai Damper Soma File Edrl Vtrw D«laf File HH y^evH r>sp ^R J ad'aw AH yj i mrtp «i ii s$_ library » a Llectncal f SiEledncal Elements >-PS-I "Fill n%UK*>al Tfjn^Kinal Simscape libraries of electrical, mechanical, hydraulic, and thermal building blocks for creating customized component models. Simscape Language The Simscape language enables you to add new physical domains and to create...
Open the catalog to page 4
component LossyUltraCapacitor % Lossy Ultracapacitor * Mode1s an ultracapacitor with resistive losses v Pate of change of C ifith wltaqe V - Effective series resistance Currant through variabla % Volt.iqfl across variable % Internal variable for; capacitor voltage function setup Brfcr{ 'Effecitivo aories rosiitane* must be greater; than ioror ) Through viriihla File Edii V** Display Digram Ana*(Srt htelp Block Pa'a'nrterF Lowy UUracapacilor Lossy Uttracapadtor Models an it*r«apatlrgr with reslsHve lessee Vkw sojce for LOSSY Ulrjacaoaritof Rate of change of C with Effectwe series resistance: selfHSscharoe...
Open the catalog to page 5
Running Parameter Sweeps: Fan Speed 4:38 Run a parameter sweep using a standalone executable. Convert the Simscape™ model to C code to enable rapid testing of parameter values. Configuring your models to run in real time enables you to use hardware-in-the-loop testing instead of expensive prototypes to test your system. You can find mistakes earlier in the development process, reducing costs and shortening the design cycle. Use HIL testing instead of hardware prototypes to test control algorithms. Convert physical model to C code and simulate in real time on controller hardware. MATLAB and Simulink...
Open the catalog to page 6
Resources Product Details, Examples, and System Requirements www.mathworks.com/products/simscape Online User Community www.mathworks.com/matlabcentral Trial Software www.mathworks.com/trialrequest Training Services www.mathworks.com/training Sales www.mathworks.com/contactsales Third-Party Products and Services www.mathworks.com/connections Technical Support www.mathworks.com/support Worldwide Contacts www.mathworks.com/contact © 2012 The MathWorks, Inc. MATLAB and Simulink are registered trademarks of The MathWorks, Inc. See www.mathworks.com/trademarks for a list of additional trademarks. Other...
Open the catalog to page 7All The MathWorks catalogs and technical brochures
 MATLAB Production Server
MATLAB Production Server6 Pages
 Database Toolbox
Database Toolbox4 Pages
 MATLAB Report Generator
MATLAB Report Generator4 Pages
 Stateflow
Stateflow8 Pages
 SimEvents
SimEvents7 Pages
 SimDriveline
SimDriveline7 Pages
 SimHydraulics
SimHydraulics7 Pages
 SimPowerSystems
SimPowerSystems8 Pages
 Simulink Control Design
Simulink Control Design5 Pages
 Aerospace Blockset
Aerospace Blockset5 Pages
 SimRF
SimRF6 Pages
 Simulink Coder
Simulink Coder6 Pages
 Embedded Coder
Embedded Coder8 Pages
 Simulink PLC Coder
Simulink PLC Coder4 Pages
 Fixed-Point Designer
Fixed-Point Designer9 Pages
 MATLAB Coder
MATLAB Coder5 Pages
 Simulink 3D Animation
Simulink 3D Animation10 Pages
 Gauges Blockset
Gauges Blockset2 Pages
 Simulink Report Generator
Simulink Report Generator3 Pages
 Polyspace Bug Finder
Polyspace Bug Finder6 Pages
 global-optimization-toolbox
global-optimization-toolbox10 Pages
 Phased Array System Toolbox
Phased Array System Toolbox9 Pages
 OPC Toolbox
OPC Toolbox5 Pages
 Simulink Design Verifier
Simulink Design Verifier7 Pages
 Simulink Design Optimization
Simulink Design Optimization10 Pages
 Filter Design HDL Coder
Filter Design HDL Coder5 Pages
 Bioinformatics Toolbox
Bioinformatics Toolbox9 Pages
 SimBiology
SimBiology6 Pages
 Computer Vision System Toolbox
Computer Vision System Toolbox10 Pages
 DSP System Toolbox
DSP System Toolbox11 Pages
 Fuzzy Logic Toolbox
Fuzzy Logic Toolbox5 Pages
 Polyspace Client for C/C++
Polyspace Client for C/C++5 Pages
 xPC Target
xPC Target5 Pages
 SimMechanics
SimMechanics7 Pages
 Simulink
Simulink6 Pages
 Data Acquisition Toolbox
Data Acquisition Toolbox8 Pages
 Image Processing Toolbox
Image Processing Toolbox7 Pages
 Signal Processing Toolbox
Signal Processing Toolbox10 Pages
 Control System Toolbox
Control System Toolbox6 Pages
 Symbolic Math Toolbox?
Symbolic Math Toolbox?6 Pages
 Parallel Computing Toolbox?
Parallel Computing Toolbox?7 Pages
 MATLAB®
MATLAB®6 Pages
 Mapping Toolbox 3.2
Mapping Toolbox 3.27 Pages
 Instrument Control Toolbox
Instrument Control Toolbox7 Pages
 Optimization Toolbox 6.0
Optimization Toolbox 6.014 Pages






Archived catalogs
 MATLAB Release Notes
MATLAB Release Notes505 Pages
 C and Fortran API Reference
C and Fortran API Reference263 Pages
 External Interfaces
External Interfaces649 Pages
 Function Reference: Volume 3 (P-Z)
Function Reference: Volume 3 (P-Z)1696 Pages
 Function Reference: Volume 2 (F-O)
Function Reference: Volume 2 (F-O)1568 Pages
 Function Reference: Volume 1 (A-E)
Function Reference: Volume 1 (A-E)1298 Pages
 Creating Graphical User Interfaces
Creating Graphical User Interfaces520 Pages
 3-D Visualization
3-D Visualization212 Pages
 Graphics
Graphics667 Pages
 MATLAB Programming Tips
MATLAB Programming Tips66 Pages
 Programming Fundamentals
Programming Fundamentals840 Pages
 Data Analysis
Data Analysis220 Pages
 Mathematics
Mathematics316 Pages
 MATLAB® Getting Started Guide
MATLAB® Getting Started Guide250 Pages


- Automation software solution
- Management software solution
- Analysis software solution
- Process software
- Windows software
- Real-time software
- Computer-aided design software
- Cloud-based software
- Control software
- Design software solution
- 3D software solution
- Measurement software
- Visualization software solution
- Simulation software solution
- Automated software
- Programming software
- Network software
- Reporting software
- Engineering software
- Machine software