- Catalogs
- The MathWorks
- Computer Vision System Toolbox
Computer Vision System Toolbox

Computer Vision System Toolbox
Computer Vision System Toolbox provides algorithms and tools for designing and simulating computer vision and video processing systems. It includes capabilities for feature extraction, motion detection, object detection, object tracking, stereo vision, video processing, and video analysis, available as MATLAB functions, System objects, and Simulink blocks. The toolbox supports fixed-point arithmetic and C code generation for rapid prototyping and embedded system design.
- Feature detection using methods like FAST, Harris, Shi & Tomasi, SURF, and MSER.
- Object detection and tracking with techniques such as Viola-Jones and CAMShift.
- Motion estimation using block matching, optical flow, and template matching.
- Video processing capabilities including video file I/O, display, and graphic overlays.
- Simulink block library for system design.
Features are interesting parts of an image, such as corners or edges. The toolbox provides methods for detecting and extracting these features, visualizing their location, scale, and orientation, and matching feature vectors to solve design challenges like registration and tracking.
The toolbox supports automatic image registration and stereo vision, using features to estimate geometric relationships between images. It includes workflows for feature-based registration and stereo image rectification, simplifying depth determination in stereo vision.
Object detection is supported through template matching, blob analysis, and the Viola-Jones algorithm. Motion estimation is achieved using optical flow and other methods, while tracking is facilitated by algorithms like CAMShift and KLT, with support for multiple object tracking using Kalman filtering.
The toolbox offers video processing tools for reading, writing, and displaying video, with capabilities for adding graphics and text to aid visualization and debugging. Stream processing is supported in both MATLAB and Simulink, allowing for efficient handling of large video files or live streams.
Supports system-level test benches, fixed-point modeling, and code generation, enabling integration of algorithm development with prototyping and verification workflows. Fixed-point modeling is supported with various configuration options, and most components can generate C code for specific hardware targets.
Additional resources include online user communities, training services, and third-party products and services.
Catalog excerpts

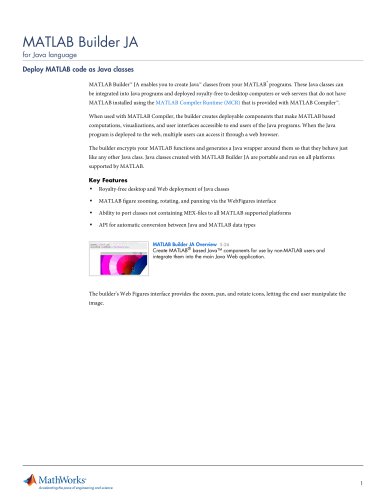
Computer Vision System Toolbox Design and simulate computer vision and video processing systems Computer Vision System Toolbox™ provides algorithms and tools for the design and simulation of computer vision and video processing systems. The toolbox includes algorithms for feature extraction, motion detection, object detection, object tracking, stereo vision, video processing, and video analysis. Tools include video file I/O, video display, drawing graphics, and compositing. Capabilities are provided as MATLAB® functions, MATLAB System objects™, and Simulink® blocks. For rapid prototyping and embedded system design, the system toolbox supports fixed-point arithmetic and C code generation. Key Features ▪ Feature detection, including FAST, Harris, Shi & Tomasi, SURF, and MSER detectors ▪ Feature extraction and putative feature matching ▪ Object detection and tracking, including Viola-Jones detection and CAMShift tracking ▪ Motion estimation, including block matching, optical flow, and template matching ▪ RANSAC-based estimation of geometric transformations or fundamental matrices ▪ Video processing, video file I/O, video display, graphic overlays, and compositing ▪ Block library for use in Simulink Feature Detection and Extraction A feature is an interesting part of an image, such as a corner, blob, edge, or line. Feature extraction enables you to derive a set of feature vectors, also called descriptors, from a set of detected features. Computer Vision System Toolbox offers capabilities for feature detection and extraction that include: ▪ Corner detection, including Shi & Tomasi, Harris, and FAST methods ▪ SURF and MSER detection for blobs and regions ▪ Extraction of simple pixel neighborhood and SURF descriptors ▪ Visualization of feature location, scale, and orientation Additionally, the system toolbox provides functionality to match two sets of feature vectors and visualize the results. When combined into a single workflow, feature detection, extraction, and matching can be used to solve many computer vision design challenges, such as registration, stereo vision, object detection, and tracking. SURF (left), MSER (center), and corner detection (right) with Computer Vision System Toolbox. Using the same image, the three different feature types are detected and results are plotted over the original image.
Open the catalog to page 1
Registration and Stereo Vision Computer Vision System Toolbox supports automatic image registration by providing algorithms that use features to estimate the geometric relationships between images or video frames. Typical uses include video mosaicking, video stabilization, image fusion, and stereo vision. Feature-Based Registration Feature detection, extraction, and matching are the first steps in the feature-based registration workflow. With a pair of images, you can detect and extract features in each image, using one of several feature types available in the system toolbox. You can then determine...
Open the catalog to page 2
Results from stereo image rectification. Non-overlapping areas are show in red and cyan. Stereo Vision Stereo vision is the process of reconstructing a 3D scene from two or more views of the scene. Using the system toolbox, you can perform uncalibrated stereo image rectification on a pair of stereo images and match individual pixels along epipolar lines to compute a disparity map. Accelerating the pace of engineering and science
Open the catalog to page 3
Reconstructing a scene using a pair of stereo images. To visualize the disparity, the right channel is combined with the left channel to create a composite (top left); also shown are a disparity map of the scene (top right) and a 3D rendering of the scene (bottom). Object Detection, Motion Estimation, and Tracking Object detection is the identification of an object in an image or video. Computer Vision System Toolbox supports several approaches to object detection, including template matching, blob analysis, and the Viola-Jones algorithm. Template matching uses a small image, or template, to...
Open the catalog to page 4
Face detection using the Viola-Jones algorithm. Motion estimation is the process of determining the movement of blocks between adjacent video frames. The system toolbox provides a variety of motion estimation algorithms, such as optical flow, block matching, template matching, and background estimation using Gaussian mixture models (GMMs). These algorithms create motion vectors, which relate to the whole image, blocks, arbitrary patches, or individual pixels. For block and template matching, the evaluation metrics for finding the best match include MSE, MAD, MaxAD, SAD, and SSD. Detecting moving...
Open the catalog to page 5
Video deinterlacing in MATLAB. Video I/O Computer Vision System Toolbox can read and write multimedia files in a wide range of formats, including AVI, MPEG, and WMV. You can stream video to and from MMS sources over the Internet or a local network. You can acquire video directly from Web cameras, frame grabbers, DCAM-compatible cameras, and other imaging devices using Image Acquisition Toolbox™. Simulink users can use the MATLAB workspace as a video source or sink. Video Display The system toolbox includes a video viewer that lets you: ▪ View video streams in-the-loop as the data is being processed...
Open the catalog to page 6
■ '£ Edft View Display C-jg'am Simulation Analyse Code Tvu\i Hdp Model with viewers for four videos: (from left) original, estimated background, foreground pixels, and results of tracking. Adding graphics to video helps with visualizing extracted information or debugging a system design. You can insert text to display the number of objects or to keep track of other key information. You can insert graphics, such as markers, lines, and polygons to mark found features, delineate objects, or highlight other key features. The system toolbox functionality fuses text and graphics into the image or video...
Open the catalog to page 7
Images with text and graphics inserted. Adding these elements can help you visualize extracted information and debug your design. Stream Processing in MATLAB and Simulink Computer Vision System Toolbox supports a stream processing architecture in both MATLAB and Simulink. In a stream processing architecture, one or more video frames from a continuous stream are processed at a time. This type of processing is appropriate for analysis of large video files or systems with live video. In MATLAB, stream processing is enabled by System objects, which use MATLAB objects to represent time-based and data-driven...
Open the catalog to page 8All The MathWorks catalogs and technical brochures
 MATLAB Production Server
MATLAB Production Server6 Pages
 Database Toolbox
Database Toolbox4 Pages
 MATLAB Report Generator
MATLAB Report Generator4 Pages
 Stateflow
Stateflow8 Pages
 SimEvents
SimEvents7 Pages
 SimDriveline
SimDriveline7 Pages
 SimHydraulics
SimHydraulics7 Pages
 SimPowerSystems
SimPowerSystems8 Pages
 Simulink Control Design
Simulink Control Design5 Pages
 Aerospace Blockset
Aerospace Blockset5 Pages
 SimRF
SimRF6 Pages
 Simulink Coder
Simulink Coder6 Pages
 Embedded Coder
Embedded Coder8 Pages
 Simulink PLC Coder
Simulink PLC Coder4 Pages
 Fixed-Point Designer
Fixed-Point Designer9 Pages
 MATLAB Coder
MATLAB Coder5 Pages
 Simulink 3D Animation
Simulink 3D Animation10 Pages
 Gauges Blockset
Gauges Blockset2 Pages
 Simulink Report Generator
Simulink Report Generator3 Pages
 Polyspace Bug Finder
Polyspace Bug Finder6 Pages
 global-optimization-toolbox
global-optimization-toolbox10 Pages
 Phased Array System Toolbox
Phased Array System Toolbox9 Pages
 OPC Toolbox
OPC Toolbox5 Pages
 Simulink Design Verifier
Simulink Design Verifier7 Pages
 Simulink Design Optimization
Simulink Design Optimization10 Pages
 Filter Design HDL Coder
Filter Design HDL Coder5 Pages
 Bioinformatics Toolbox
Bioinformatics Toolbox9 Pages
 SimBiology
SimBiology6 Pages
 DSP System Toolbox
DSP System Toolbox11 Pages
 Fuzzy Logic Toolbox
Fuzzy Logic Toolbox5 Pages
 Polyspace Client for C/C++
Polyspace Client for C/C++5 Pages
 xPC Target
xPC Target5 Pages
 SimMechanics
SimMechanics7 Pages
 Simscape
Simscape7 Pages
 Simulink
Simulink6 Pages
 Data Acquisition Toolbox
Data Acquisition Toolbox8 Pages
 Image Processing Toolbox
Image Processing Toolbox7 Pages
 Signal Processing Toolbox
Signal Processing Toolbox10 Pages
 Control System Toolbox
Control System Toolbox6 Pages
 Symbolic Math Toolbox?
Symbolic Math Toolbox?6 Pages
 Parallel Computing Toolbox?
Parallel Computing Toolbox?7 Pages
 MATLAB®
MATLAB®6 Pages
 Mapping Toolbox 3.2
Mapping Toolbox 3.27 Pages
 Instrument Control Toolbox
Instrument Control Toolbox7 Pages
 Optimization Toolbox 6.0
Optimization Toolbox 6.014 Pages






Archived catalogs
 MATLAB Release Notes
MATLAB Release Notes505 Pages
 C and Fortran API Reference
C and Fortran API Reference263 Pages
 External Interfaces
External Interfaces649 Pages
 Function Reference: Volume 3 (P-Z)
Function Reference: Volume 3 (P-Z)1696 Pages
 Function Reference: Volume 2 (F-O)
Function Reference: Volume 2 (F-O)1568 Pages
 Function Reference: Volume 1 (A-E)
Function Reference: Volume 1 (A-E)1298 Pages
 Creating Graphical User Interfaces
Creating Graphical User Interfaces520 Pages
 3-D Visualization
3-D Visualization212 Pages
 Graphics
Graphics667 Pages
 MATLAB Programming Tips
MATLAB Programming Tips66 Pages
 Programming Fundamentals
Programming Fundamentals840 Pages
 Data Analysis
Data Analysis220 Pages
 Mathematics
Mathematics316 Pages
 MATLAB® Getting Started Guide
MATLAB® Getting Started Guide250 Pages


- Automation software solution
- Management software solution
- Analysis software solution
- Process software
- Windows software
- Real-time software
- Computer-aided design software
- Cloud-based software
- Control software
- Design software solution
- 3D software solution
- Measurement software
- Visualization software solution
- Simulation software solution
- Automated software
- Programming software
- Network software
- Reporting software
- Engineering software
- Machine software