- Catalogs
- Lin Engineering
- maximizing torque at desired speed
maximizing torque at desired speed
1 /61Pages

maximizing torque at desired speed
1 /61Pages
Catalog excerpts
FRONT COVER
Open the catalog to page 1
for Motion Control Applications We know how to maximize torque at your operating speed to eliminate guesswork from the motor selection process. (See page 9) Trial and error is not an option. We inventory components in Morgan Hill, California to provide Rapid Prototype Delivery and Short Lead Times. We have full manufacturing We have volume manufacturing capabilities in China. (See page 5-6) Q We have our own quality team in China and in the U.S. to guarantee high quality products prior to shipping. Q We have the best microstepping motor in the world in terms of step accuracy to provide smooth...
Open the catalog to page 2
LIN STANDARD PART NUMBERING SYSTEMS Special Modifications Special Features Special Identifiers T: Noise Reduced Connection Integrated Motors Only (SilverPak Series) Frame Size Winding Code Overall Length Special Modifications Special Features Special Identifiers T: Noise Reduced Connection R: Noise Reduced Winding M: Mounting option for 3709 motors* Any Size 34 motor without a "S" or "P" have eight leads standard and M1, SIGNATURE, CAST MTG SIZE 17, #4-40 UNC M2, SIGNATURE, CAST MTG SIZE 17, M3 X 0.5 M3, SIGNATURE, CAST MTG SIZE 17, 0.130 THRU M4, SIGNATURE, CAST MTG SIZE 14, #4-40 UNC M5, SIGNATURE,...
Open the catalog to page 3
MISSION & HISTORY MISSION STATEMENT The main reason for our existence is that we provide solutions for motion control applications. We are your solution. COMPANY HISTORY Over the years Lin Engineering has earned the reputation as the technical leader in step motor design with the ability to “Maximize Torque at Desired Speed”. Founded by Ted T. Lin in 1987, Lin Engineering began as a consulting company specializing in step motor applications. Throughout its history, Lin Engineering has continued to develop its capabilities in the areas of design engineering, manufacturing, and customer service....
Open the catalog to page 4
UN ENGINEERING'S ASIA HEADQUARTERS Scale your business with Lin Engineering at design and pre-pro- duction levels. At low volumes, Lin Engineering has full design and manufacturing capabilities in Morgan Hill, CA. For high volumes, we have a proven process for transferring both tech- nology and product to our Asia Headquarters, Linex, for cost effective manufacturing without sacrificing quality. V Cost effective solution without sacrificing quality V Double source through a single supplier V Consistently high service and support V Minimize lead times Customer Service j [ Quality & Reliability___j...
Open the catalog to page 5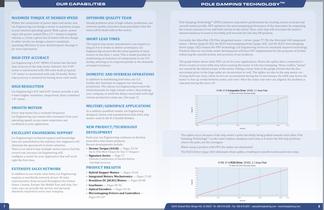
OUR CAPABILITIES Within the constraints of power input and motor size, Lin Engineering can design a motor to maximize torque at your desired operating speed. With a given power input, the power output ƒTd ω ( T = torque at angular velocity ω ) from a given size of motor will not change. In other words, we design a motor’s maximum operating efficiency at your desired speed. See page 9 for more information. Maximize Torque at Desired Speed Lin Engineering’s 0.45° NEMA 23 motor has the best step accuracy in the step motor industry. Our 0.45° motor is constructed with 200 rotor teeth (a typical 1.8°...
Open the catalog to page 6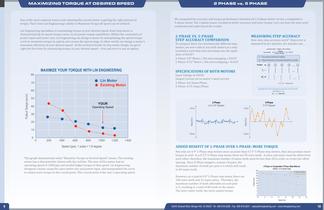
MAXIMIZING TORQUE AT DESIRED SPEED One of the most common issues with selecting the correct motor is getting the right amount of torque. That's how Lin Engineering's ability to Maximize Torque @ Speed can be utilized. Lin Engineering specializes in maximizing torque at your desired speed. Each step motor is characterized by its speed-torque curve, or, its power output capabilities. Within the constraints of power input and motor size, Lin Engineering can design a motor by manipulating the speed-torque curve to maximize torque in a given area across the speed range. In other words, we design a...
Open the catalog to page 7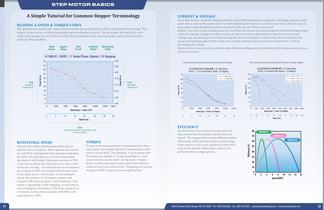
STEP MOTOR BASICS A Simple Tutorial for Common Stepper Terminology READING A SPEED & TORQUE CURVE The graph below depicts the relationship between speed and torque while a step motor is running. The output torque is very critical during the motor selection process. On the graph, the vertical y-axis represents torque (oz-in and N-m) while the horizontal x-axis represents the speed of the motor's torque (oz-in) Phase Connection Microstepping Current Scheme Setting represents the speed of the motor's shaft ROTATIONAL SPEED Step motors rotate continuously when given a specific series of pulses. Motor...
Open the catalog to page 8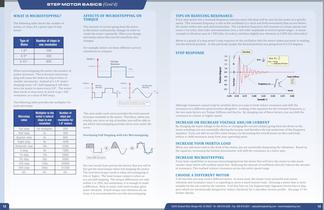
STEP MOTOR BASICS (Cont'd) The following table shows the number of pulses, or steps, for a given type of step When microstepping the motor, the number of pulses increases. This is because microstep- ping will cause the motor to step in finer, or smaller, increments. Instead of a 1.8° motor stepping every 1.8°, half stepping it will then force the motor to move every 0.9°. The motor then needs to step twice as much to go 1 full revolution, or a total of 400 steps. The following table provides the multiplier for each microstep: The amount of current going from the driver to the motor continuously...
Open the catalog to page 9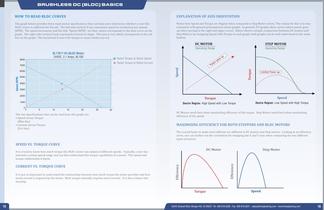
BRUSHLESS DC (BLDC) BASICS how to read bldc curves The graph below provides three main motor specifications that can help users determine whether or not this BLDC motor is sufficient for the job. The left-side vertical Y-axis represents speed in revolutions per minute (RPM). The speed increments and the title “Speed (RPM)” are blue, which corresponds to the blue curve on the graph. The right-side vertical Y-axis represents Current in Amps. This axis is red, which corresponds to the red line on the graph. The horizontal X-axis is for torque in ounce-inches (oz-in). EXPLANATION OF AXIS ORIENTATION...
Open the catalog to page 10
CUTTING EDGE TECHNOLOGY FROM THE LEADER IN S T E P M O T O R I N N O V AT I O N FOR: FOR: * Smooth Motion * High Accuracy & Reliability * Low Noise * High Torque & Reliability * Energy & Space Efficiency * Low Noise 100 oz-in Holding Torque 71 oz-in 61 oz-in Holding Torque 37 oz-in Holding Torque 27 oz-in Holding Torque Holding Torque Xtreme Torque 4418S Series Comparison 1.8º Step Motor, 24VDC, Rated Current, Bipolar, 1/2 Stepping 60.00 35% Resonance by up to Lin’s Standard 4118S 40.00 MORE TORQUE 30.00 with the SAME POWER INPUT 50% Motor length: 1.35” 50.00 Get Up to Reduce System Lin’s Xtreme...
Open the catalog to page 11All Lin Engineering catalogs and technical brochures
 SilverPak 17D Plus
SilverPak 17D Plus1 Page
 5818 ?Super Torque
5818 ?Super Torque1 Page
 4518 ? Signature Series
4518 ? Signature Series1 Page
 208 ? Standard Motor
208 ? Standard Motor1 Page
 High Torque
High Torque1 Page
 Why Lin 2014
Why Lin 20142 Pages
 MICROSTEPPING DRIVER
MICROSTEPPING DRIVER2 Pages
 R208
R2083 Pages
 8718 HIGH TORQUE MOTOR
8718 HIGH TORQUE MOTOR1 Page
 8618 STANDARD MOTOR
8618 STANDARD MOTOR1 Page
 5718 HIGH TORQUE MOTOR
5718 HIGH TORQUE MOTOR1 Page
 5618 STANDARD MOTOR
5618 STANDARD MOTOR1 Page
 5609 STANDARD MOTOR
5609 STANDARD MOTOR1 Page
 5704 HIGH ACCURACY MOTOR
5704 HIGH ACCURACY MOTOR1 Page
 4418 XTREME TORQUE MOTOR
4418 XTREME TORQUE MOTOR1 Page
 4118 SUPER TORQUE MOTOR
4118 SUPER TORQUE MOTOR1 Page
 4018 STANDARD MOTOR
4018 STANDARD MOTOR1 Page
 4209 HIGH TORQUE MOTOR
4209 HIGH TORQUE MOTOR1 Page
 4109 GOLD LINE MOTOR
4109 GOLD LINE MOTOR1 Page
 3518 STANDARD MOTOR
3518 STANDARD MOTOR1 Page
 211 COMPACT MOTOR
211 COMPACT MOTOR1 Page
 208 COMPACT MOTOR
208 COMPACT MOTOR1 Page
 SilverPak 17C/CE
SilverPak 17C/CE2 Pages
 SILVERPAK 23D/DE
SILVERPAK 23D/DE3 Pages
 SilverPak 23C
SilverPak 23C2 Pages
 GOLD LINE MOTOR
GOLD LINE MOTOR2 Pages
 MODULAR MOTOR 3609 SERIES
MODULAR MOTOR 3609 SERIES2 Pages
 1.8° SIZE 11
1.8° SIZE 112 Pages
 STANDARD MOTOR
STANDARD MOTOR2 Pages
 SilverPak 17T
SilverPak 17T3 Pages
 1.8º SIZE 14
1.8º SIZE 142 Pages
 HIGH TORQUE MOTOR 3509V
HIGH TORQUE MOTOR 3509V2 Pages
 Lin Catalog 2006
Lin Catalog 2006100 Pages







Archived catalogs
 STANDARD MOTOR 8618
STANDARD MOTOR 86182 Pages
 STANDARD MOTOR 5609
STANDARD MOTOR 56092 Pages
 SUPER TORQUE MOTOR 4118
SUPER TORQUE MOTOR 41182 Pages
 SUPER TORQUE MOTOR 4118
SUPER TORQUE MOTOR 41182 Pages
 STANDARD MOTOR 4018
STANDARD MOTOR 40182 Pages
 HIGH TORQUE MOTOR 4209
HIGH TORQUE MOTOR 42092 Pages

- Electromotor
- DC electromotor
- Actuator
- Multipole motor
- Linear actuator
- Angular encoder
- Electric actuator
- Planetary gearbox
- Coaxial gearhead
- Incremental encoder
- Precision gearhead
- 24 V motor
- Incremental rotary encoder
- Solid-shaft gearhead
- 2-pole motor
- Compact electromotor
- 12 V motor
- Absolute rotary encoder
- Gearbox for industrial applications
- Screw actuator