JPGB
1 /4Pages
JPGB
1 /4Pages
Catalog excerpts

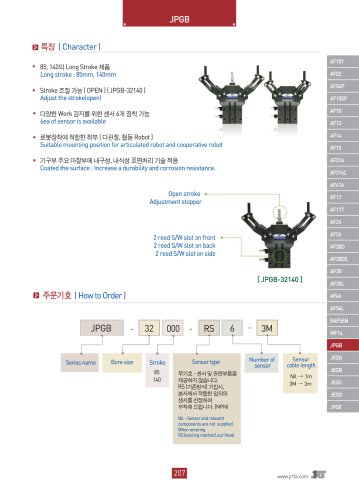
JPGBB ^-g (Character) ■ 85,140°| Long Stroke *||1§ Suitable mounting position for articulated robot and cooperative robot Coated the surface : Increase a durability and corrosion resistance. Open stroke •-Adjustment stopper Nil - Sensor and relevant components are not supplied. When entering R$(existing method),our Head
Open the catalog to page 1
□ Gripping Force Diagram ■ JPGB-3285 3 (bar) After 100 consecutive strokes to end position * ZLB|it| 97-1 ^JO|Oj| CCfa^ZLB|lL-| iO)|Ai Shows the arithmetic total of the individual forces that occur on thegripper fingers, depending on the gripper finger length. The above values changes according to the using conditions. Ex] material & shape of gripper jig and etc.
Open the catalog to page 2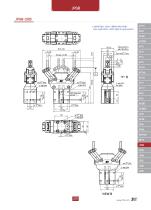
JPGB * S|^H 4|^J0|: 60mm ( [a] *b\ jj|x| ] Max. length attach : 60mm (0 to the grip position)
Open the catalog to page 3All JRT catalogs and technical brochures
 JEGBW series
JEGBW series2 Pages
 JEGK series.
JEGK series.2 Pages
 JEGL series.
JEGL series.2 Pages
- Cylinder
- Actuator
- Electric actuator
- Pneumatic cylinder
- Pneumatic gripper
- Position transducer
- Compact actuator
- Screw actuator
- Linear position transmitter
- Piston cylinder
- Parallel gripper
- 2-jaw gripper
- Compact cylinder
- Standard cylinder
- Precision actuator
- No-contact position sensor
- Pneumatic actuator
- Ball screw actuator
- Compact gripper
- Control actuator