- Catalogs
- JAKOB Antriebstechnik GmbH
- ELASTOMER COUPLINGS – CLAW COUPLINGS
- Company
- Products
- Catalogs
- News & Trends
- Exhibitions
ELASTOMER COUPLINGS – CLAW COUPLINGS
1 /2Pages

ELASTOMER COUPLINGS – CLAW COUPLINGS
1 /2Pages
Catalog excerpts

Elastomer Couplings I General Definition - Elastomer Couplings: Elastomer couplings can be plugged in, are backlash-free, flexible shaft couplings for small to medium torques. An elastomer spider serves as connection and compensating element with involute teeth and a high shore hardness. This is inserted in form-fit, with slight preload between two high-precision machined hubs with involutely shaped jaws. The elastomer spider can compensate slight shaft misalignments, is electrically insulating and has good oscillation dampening characteristics. Two variations with backlash-free, frictional shaft-hub connection are available as standard which ensure safe torque transfer even without keyways. Characteristics - JAKOB Elastomer Couplings: J plug-in J backlash-free S flexible J compact J oscillation dampening f different shore hardnesses J low moment of inertia J high speeds J electrically insulating J temperatures up to 120°C Coupling dimensioning: The main layout criteria are the required drive torque, the necessary torsional stiffness, the running speeds, the dampening characteristics of the coupling, and the moment of inertia. Additionally, the minimum or maximum possible shaft diameter, the admissible temperature range, operating factors, and the existing shaft misalignment (particularly the radial misalignment) must be taken into consideration. Approximation of required torque: Roughly, the required coupling torque TK can be calculated as for the following formula: Ta = drive torque [Nm] fD = torsional stiffness factor fT = temperature factor fB = operating factor The calculated coupling torque TK should not exceed the nominal torque of the selected coupling size. Short term overload up to twice the value of the nominal torque is admissible. The drive torque results from product information of drive motor or can be calculated via motor output PA. Ta = drive torque [Nm] PA = motor output [kW] nB = motor speed [min-1] Admissible temperature range for continuous operation PUR 98 Sh - A: -30°C up to +90°C PUR 72 Sh - D: -20°C up to +120°C
Open the catalog to page 1
Elastomer Couplings I General Torsional stiffness factor fD: If an exact, accurate transfer of the torque is required, as for instance with servo drives or measuring systems, a high torsional stiffness is absolutely necessary. Here the required drive torque should be multiplied with a operating factor of at least 3 to 10 when selecting the size, or a torsionally stiff metal bellows coupling selected from the extensive coupling range in this catalogue. Operating factor fB: Due to operating factor fB application specific peculiarities, such as shock loading, are taken into consideration. Dimensions...
Open the catalog to page 2All JAKOB Antriebstechnik GmbH catalogs and technical brochures
 Datasheet HMD
Datasheet HMD1 Page
 Datasheet ZDF-o
Datasheet ZDF-o1 Page
 Datasheet ZDF-u
Datasheet ZDF-u1 Page
 Datasheet KHS
Datasheet KHS1 Page
 catalogue servo- couplings
catalogue servo- couplings56 Pages
 Datasheet MOH-C
Datasheet MOH-C1 Page
 Datasheet MJT & MJT-C
Datasheet MJT & MJT-C1 Page
 Datasheet MJT
Datasheet MJT1 Page
 Datasheet SKB-EK
Datasheet SKB-EK1 Page
 Datasheet MSP / MSPD
Datasheet MSP / MSPD1 Page
 Datasheet MKA
Datasheet MKA1 Page
 Datasheet MOH
Datasheet MOH1 Page
 Datasheet SKY-ES
Datasheet SKY-ES1 Page
 Datasheet SKY-KS
Datasheet SKY-KS1 Page
 datasheet SKW
datasheet SKW1 Page
 Datasheet SKW-EK
Datasheet SKW-EK1 Page
 MCF-VA
MCF-VA2 Pages
 Datasheet WD-VA
Datasheet WD-VA1 Page
 Datasheet SKY-KP
Datasheet SKY-KP1 Page
 Datasheet SKW-KP
Datasheet SKW-KP1 Page
 Datasheet WDS
Datasheet WDS1 Page
 Datasheet MKM
Datasheet MKM1 Page
 Datasheet MKP
Datasheet MKP1 Page
 Datasheet SKB
Datasheet SKB1 Page
 Datenblatt MKG-VA
Datenblatt MKG-VA1 Page
 Datasheet EKHZ
Datasheet EKHZ1 Page
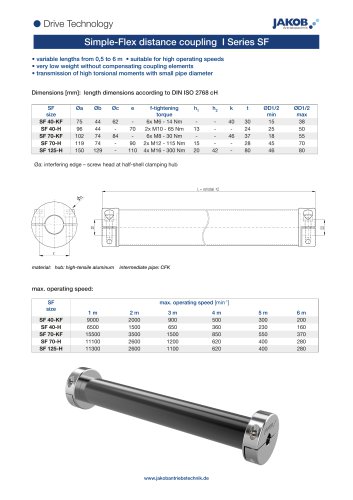 Datasheet Simple-Flex
Datasheet Simple-Flex2 Pages
 Datasheet MCG
Datasheet MCG1 Page
 Datasheet EKM-VA
Datasheet EKM-VA1 Page
 Distanzkupplung WDB
Distanzkupplung WDB1 Page
 Datasheet SKB-KP
Datasheet SKB-KP1 Page
 Datasheet SKR
Datasheet SKR1 Page
 Datasheet KG
Datasheet KG1 Page
 Datasheet KG-VA
Datasheet KG-VA1 Page
 Datasheet KP
Datasheet KP1 Page
 Datasheet KM
Datasheet KM1 Page
 Datasheet KR
Datasheet KR1 Page
 Datasheet KSS
Datasheet KSS1 Page
 Datasheet MKG
Datasheet MKG1 Page
 Datasheet KGH
Datasheet KGH1 Page
 Datasheet KSD
Datasheet KSD1 Page
 Datasheet KPS
Datasheet KPS1 Page
 Datasheet KE
Datasheet KE1 Page
 Datasheet KPP
Datasheet KPP1 Page
 Datasheet KGH-VA
Datasheet KGH-VA1 Page
 Datasheet ESM-A
Datasheet ESM-A1 Page
 Datasheet EKH
Datasheet EKH1 Page
 Datasheet EKM
Datasheet EKM1 Page
 Datasheet KXL
Datasheet KXL2 Pages
 Datasheet MDA
Datasheet MDA1 Page
 Datasheet EKS
Datasheet EKS1 Page
 Datasheet KGE
Datasheet KGE1 Page
 Datasheet MCA-S / MCA-T
Datasheet MCA-S / MCA-T1 Page
 Datasheet MCA
Datasheet MCA1 Page
 Catalogue Clamping Elements
Catalogue Clamping Elements26 Pages
 Catalogue Safety Couplings
Catalogue Safety Couplings24 Pages
 Datasheet SC
Datasheet SC2 Pages
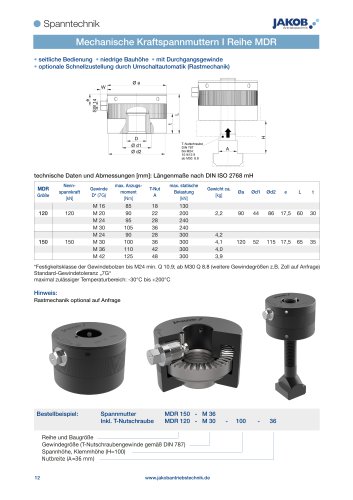 Datasheet MDR
Datasheet MDR1 Page
 Metal Bellows Couplings
Metal Bellows Couplings2 Pages
 Hydraulic load cells
Hydraulic load cells2 Pages







- Force sensor
- Clamping device
- Nut
- Flexible coupling
- Metal nut
- Flange coupling
- Analog load cell
- Torque coupling
- Transmission coupling
- Zero-backlash shaft coupling
- Hexagonal nut
- Stainless steel nut
- Compact coupling
- Clamping element
- Misalignment correction coupling
- Overload clutch
- Hydraulic clamping
- Industrial coupling
- Maintenance-free coupling