- Catalogs
- Grand Growth
- JTE - Linear Motor Driect-Drive Module Catalogue
- Company
- Products
- Catalogs
- News & Trends
- Exhibitions
JTE - Linear Motor Driect-Drive Module Catalogue
1 /23Pages
JTE - Linear Motor Driect-Drive Module Catalogue
1 /23Pages
Catalog excerpts

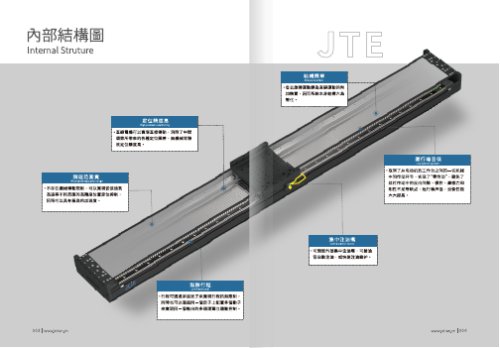
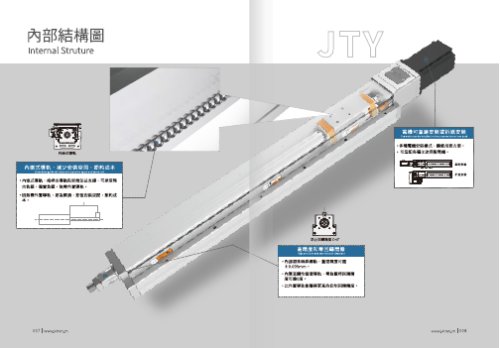
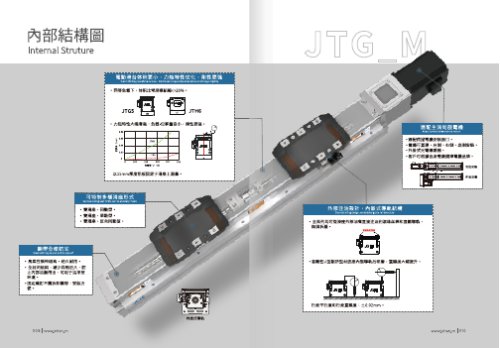
Internal Struture High precision positioning •mraRTJXJtm&m - mist*®
Open the catalog to page 1
High precision embedded ball slide rail
Open the catalog to page 2
XY-A-Arm type with two axis XYZ-A-UffH^ XYZ-A-Arm type with three axis XYZ-M-HffH$i XYZ-M-Arm type with three axis XX-G-Spontaneous moving Gantry Type MZ-k-mEM ■ ZM*fl£BHi XYZ-A-Arm type with three axis,movement by Z axis xY-G-iip^$4 > XY-G-Spontaneous moving Gantry Type with two axis. Auxiliary guide rail XY-G-liP1Pi]®$4 > XY-G-Spontaneous moving Gantry Type with two axis. Y axis horizontal installatin xYz-G-mp^tt > XYZ-G-Spontaneous moving Gantry Type with three axis. Auxiliary guide rail XYZ-G-IIF1Z& . ZM*HSHl > MBmi XYZ-G-Spontaneous moving Gantry Type with three axis, movement by Z axis,...
Open the catalog to page 3
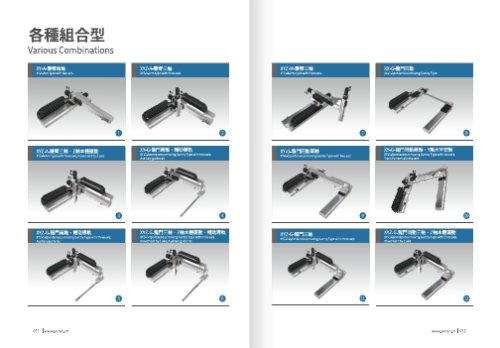
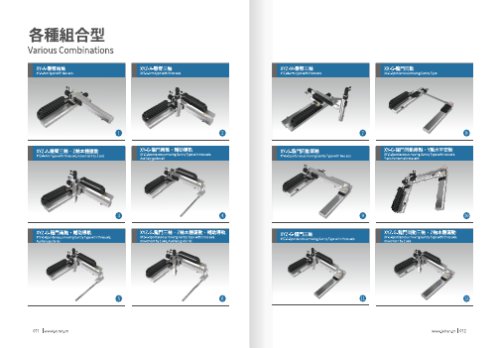
Various CombinationsXZ-F-+?M$A Cross two axis xz-f-+?®!4 > Cross two axis,Movement by Z axis xz-f-+?m$a > > 7Kw-^ ■ xz-f-+^®$4 > Cross two axis,Movement by zaixs,Horizontal installation Cross two axis,Horizontal installation XYY-G-IIP^^I^ XVY-G-Gantry combinatorial association XYYZZ-A-HimA$A XYYZZ-A-Arm type with six axis MovingArm Type with two axis MovingArmTypewiththreeaxis
Open the catalog to page 4
mmzimj Standard/ linear servo motor >wm*m Gmfcx&D Iron-core Linear Servo Motor ©After simple taste. © Based on high-resolution encoder. ® Based on acceleration 1G, speed 2m/sJ running distance lm. sterna mmmw. Stroke Quantity Motor model Encoder code Resolving power Drive letter
Open the catalog to page 5
Iron-core Linear Servo Motor © After simple taste. © Based on high-resolution encoder. ® Based on acceleration 1G, speed 2m/s, running distance lm.
Open the catalog to page 7
Standard/ linear servo motor Ordering method This figure is for reference only.the shipping specifications are detailed in the dimension drawing. Stroke Quantity Motor model Photoelectric quantity Cable length >sIron-core Linear Servo Motor Resolving power Drive letter Control mode
Open the catalog to page 9
Standard/ linear servo motor >wum Gm&x&D Iron-core Linear Servo Motor ©After simple taste. ©Based on high-resolution encoder. <D Based on acceleration 1G, speed 2m/s, running distance lm. This figure is for reference only.the shipping specifications are detailed in the dimension drawing. Stroke Quantity Motor model Cable length Encoder code Resolving power Drive letter Control mode
Open the catalog to page 11
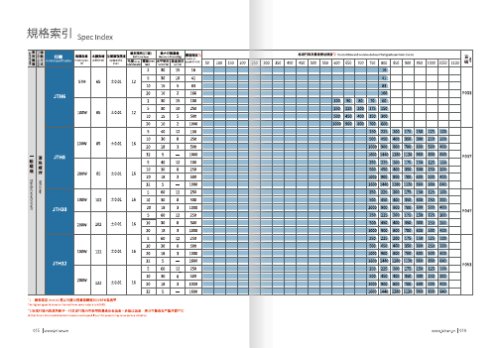
jcIe rjflBBBieaoHKcn 285 | www.jetran.cn www.jetran.cn | 286 i i «=■/■&!©£« aift/iesKBfcH® wag i?®#® wn/maimim i General/ x Clean/ x General/ g Clean/ g Screw/Embeded <£ Belt/Embeded g Linear motor £ Embeded rail/push ^ s Reference screwsample tn screwsample H beltsample ^ beltsample =! guide rail sample ^ guide rail sample ^ rod/screw sample ^ General/ -> screw sample
Open the catalog to page 12
Standard/ linear servo motor Maximum stroke >mmmm Iron-core Linear Servo Motor Resolving power Drive letter Control mode
Open the catalog to page 13
jcIe Standard/ linear servo motor urnwmm ■ uftauftsuy^iiiB This figure is for reference only.the shipping specifications are detailed in the dimension drawing. Encoder code ©After simple taste. (D Based on high-resolution encoder. (D Based on acceleration 1G, speed 2m/s, running distance lm.
Open the catalog to page 15
Standard/ linear servo motor Maximum stroke L£lt£! II Rated Force@KX)c >ra*is Iron-core Linear Servo Motor ©After simple taste. ©Based on high-resolution encoder. ® Based on acceleration 1G, speed 2m/s, running distance lm. ^ T Immim m*wm maw Stroke Quantity Motor model Cable length Encoder code Resolving power Drive letter Control mode
Open the catalog to page 17
>mum Iron-core Linear Servo Motor ©After simple taste. ©Based on high-resolution encoder. ® Based on acceleration 1G, speed 2m/s, running distance lm. Maximum stroke Peak Force Rated FbfDS@lJD()c Linear Guide Motor model Encoder code Resolving power Control mode sJlftfHI «a 299 | www.jetran.cn www.jetran.cn | 300 n> ^
Open the catalog to page 19
ffigmis&Kn Warranty JCIE robots are designed and manufactured to be free from defects in materials and workmanship. However,should any failure occur in the robot you purchaesd, the JCIE warranty coverage is as follows. This warranty will not apply in the following cases : Warranty Period This warranty is effective for a period of: % 12 months (one and a half years) after shipment from Taiwan factory,or % 2,500 hours of actual operation whichever comes first. % Fatigue arising due to the passage of time, natural wear and tear occurring during operation (natural fading of panited or plated surfaces,...
Open the catalog to page 21
Measring Tools i. tH8?fTis/«ns Parallelism Testing / Height Testing. Measuring Tools: Dial Gauge N Dial Indicator Measuring Methods: 1. IMaB£ft£N£± Fix the actuator on granite. 2. KBJIHSftUUlM Fix the measuring tools on the actuator's slider. 2. Absolute Straightness Accuracy Testing Measuring Tools: Laser Interferometer Detection Measuring Methods: 1. l«ABCft«N:B± Fix the actuator on granite. 2. il«9B£K9ia99 Fix the measuring tools on the actuator's slider. 3. SnflSJn 77 3Ml!l is photo display. 4. ae5ijEniiju®£ Print the test report as a recoder. Belt Tension Testing Measuring Tools: fiffOMBMI...
Open the catalog to page 22
Technical Wording Relerence Flatness and Straightness Standard ftttAIIJIft Overhang Load Length Straightness: Fixed the actuator on the measuring plate and measure the parallelism of the datum plane of the carriage and straightness gauge, which should be less than O.lmm/M. Flatness: Fixed the actuator on the measuring plate and measure the parallelism of the datum plane of the carriage and mounting surface of the actuator, which should be less than O.lmm/M. ftftAffjtaaftaMCTftSftainMtrai • An overhang load length is specified for a slider-type actuator to indicate the length of overhang (offset)...
Open the catalog to page 23All Grand Growth catalogs and technical brochures
 Laser engraving machine B2-430
Laser engraving machine B2-43014 Pages
 JGE&JCH&JTE
JGE&JCH&JTE10 Pages
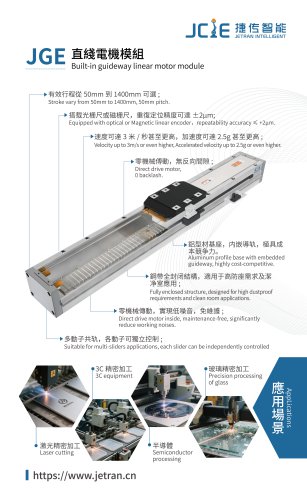
 DC linear motor JTE23
DC linear motor JTE23185 Pages
 factory introduction 2024
factory introduction 202420 Pages







- Cutting system
- Metal cut-off machine
- Cylinder
- CNC cutting center
- Laser cutting machine
- Sheet metal cutting machine
- Double-acting cylinder
- Plastic cutting machine
- Fiber laser cutting machine
- Precision cut-off machine
- Stainless steel cutting system
- Sheet cutting machine
- Single-acting cylinder
- Cutting system with automated loading
- Carbon steel cutting machine
- Compact cylinder
- Bridge cutting machine
- Profile cutting system
- ISO cylinder
- Aluminum alloy cylinder