- Catalogs
- GÖTTING KG
- HG S-57652ZD
HG S-57652ZD
1 /2Pages
HG S-57652ZD
1 /2Pages
Catalog excerpts

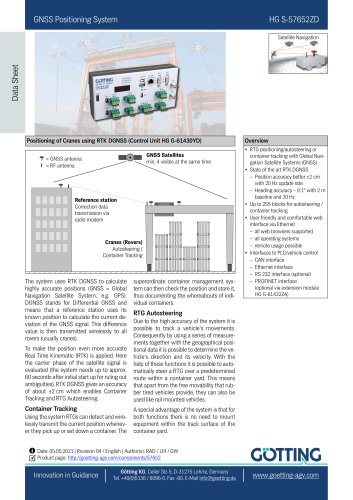
GNSS Positioning System Data Sheet Satellite Navigation Positioning of Cranes using RTK DGNSS (Control Unit HG G-61430YD) GNSS Satellites min. 4 visible at the same time = GNSS antenna = RF antenna Reference station Correction data transmission via radio modem Cranes (Rovers) Autosteering / Container Tracking The system uses RTK DGNSS to calculate highly accurate positions (GNSS = Global Navigation Satellite System, e.g. GPS). DGNSS stands for Differential GNSS and means that a reference station uses its known position to calculate the current deviation of the GNSS signal. This difference value is then transmitted wirelessly to all rovers (usually cranes). To make the position even more accurate Real Time Kinematic (RTK) is applied. Here the carrier phase of the satellite signal is evaluated (the system needs up to approx. 60 seconds after initial start up for ruling out ambiguities). RTK DGNSS gives an accuracy of about ±2 cm which enables Container Tracking and RTG Autosteering. Container Tracking Using the system RTGs can detect and wirelessly transmit the current position whenever they pick up or set down a container. The superordinate container management system can then check the position and store it, thus documenting the whereabouts of individual containers. Overview RTG positioning/autosteering or container tracking with Global Navigation Satellite Systems (GNSS) State of the art RTK DGNSS – Position accuracy better ±2 cm with 20 Hz update rate – Heading accuracy ~ 0.1° with 2 m baseline and 20 Hz Up to 255 blocks for autosteering / container tracking User friendly and comfortable web interface via Ethernet – all web browsers supported – all operating systems – remote usage possible Interfaces to PLC/vehicle control – CAN interface – Ethernet interface – RS 232 interface (optional) – PROFINET interface (optional via extension module HG G-61432ZA) RTG Autosteering Due to the high accuracy of the system it is possible to track a vehicle‘s movements. Consequently by using a series of measurements together with the geographical positional data it is possible to determine the vehicle‘s direction and its velocity. With the help of these functions it is possible to automatically steer a RTG over a predetermined route within a container yard. This means that apart from the free movability that rubber tired vehicles provide, they can also be used like rail mounted vehicles. A special advantage of the system is that for both functions there is no need to mount equipment within the track surface of the container yard. Date: 05.05.2021 | Revision 04 / English | Author(s): RAD / LM / GW Product page: http://goetting-agv.com/components/57652 Götting KG, Celler Str. 5, D-31275 Lehrte, Germany Tel. +49(0)5136 / 8096-0, Fax -80, E-Mail info@
Open the catalog to page 1
HG S-57652ZD Operating Conditions Obstacles (e.g. buildings, trees, etc.), that are higher than the horizon of the GNSS antennas, may generally have a bad influence on the satellite reception. As a result of these shadings and/or reflections, the accuracy of the GNSS may decrease. Even a total breakdown of the GNSS might be possible. Therefore it is advisable, to include the Gotting KG already in the project planning phase. Components Reference Station Control Unit HG G-61430YD Mounting on a 35 mm top hat rail according to EN50022 PROFINET extension module HG G-61432ZA (optional) Component-List...
Open the catalog to page 2All GÖTTING KG catalogs and technical brochures
 HG G-19321-A
HG G-19321-A2 Pages
 HG G-76343/4/5-A
HG G-76343/4/5-A2 Pages
 HG 73841-B
HG 73841-B2 Pages
 G_70610RE
G_70610RE1 Page
- Digital imager
- Visible imager
- Industrial camera module
- Generator
- Compact imager
- Inspection imager
- Rugged camera
- Distance sensor
- Laser scanner
- Measurement scanner
- Outdoor antenna
- Magnetic sensor
- Signal generator
- IP67 antenna
- External antenna
- Analog distance sensor
- RS232 modem
- Data modem
- Standby tracker
- Tracking antenna