- Catalogs
- FAULHABER Drive Systems
- Technical Information
Technical Information
1 /162Pages

Technical Information
1 /162Pages
Catalog excerpts

Technical Information
Open the catalog to page 1
As at: 12th edition, 2019 Copyright by Dr. Fritz Faulhaber GmbH & Co. KG Daimlerstr. 23 / 25 • 71101 Schonaich All rights reserved, including translation rights. No part of this description may be duplicated, reproduced, stored in an information system or processed or transferred in any other form without prior express written permission of Dr. Fritz Faulhaber GmbH & Co. KG. This document has been prepared with care. Dr. Fritz Faulhaber GmbH & Co. KG cannot accept any liability for any errors in this document or for the consequences of such errors. Equally, no liability can be accepted for direct...
Open the catalog to page 2
Contents DC-Motors DC-Micromotors Flat DC-Micromotors & DC-Gearmotors Brushless DC-Motors Brushless DC-Servomotors Brushless Flat DC-Micromotors & DC-Gearmotors Motors with integrated Electronics Brushless DC-Motors with integrated Speed Controller Brushless DC-Servomotors with integrated Motion Controller Stepper Motors Stepper Motors Linear DC-Servomotors Linear DC-Servomotors Precision Gearheads Precision Gearheads Linear Components Ball Screws Lead Screws and Options Encoders – 2 Channel Encoders – 3 Channel Encoder – Absolute Drive Electronics Speed Controller Motion Cont
Open the catalog to page 3
DC-Micromotors Technical Information Magnets: Page FAULHABER DC Motors are designed with a variety of 32 – 33 different types of magnets to suit the particular perforPrecious Metal Commutation 0,17 mNm 34 – 35 mance of the given motor type. These materials include Precious Metal Commutation 0,72 mNm 36 – 37 AlNiCo magnets and high performance rare earth types Precious Metal Commutation 0,59 mNm 38 – 39 such as SmCo and NdFeB. Precious Metal Commutation 2 mNm 40 – 41 General information FAULHABER S/G DC-Micromotors Portfolio description The FAULHABER Winding: 0615 … S Originally invented by Dr....
Open the catalog to page 5
Technical Information Modifications: FAULHABER specializes in the configuration of its standard products to fit the customer application. Available modifications for FAULHABER DC Motors include: ■ Many other nominal voltage types ■ Motor leads (PTFE and PVC) and connectors ■ Configurable shaft lengths and second shaft ends ■ Modified shaft dimensions and pinion configurations such as flats, gears, pulley and eccenters ■ Modifications for extreme high and low temperature operation ■ Modifications for operation in a vacuum (ex. 10-5 Pa) ■ Modifications for high speed and / or high load applications...
Open the catalog to page 6
DC-Micromotors Technical Information Mechanical time constant τm [ms] The time required for the motor to reach a speed of 63% of its final no-load speed, from standstill. shaft, bearing, lubrication, and commutation system or combinations with other components such as gearheads or encoders will all result in a change to the no-load current of the motor. Stall torque MH [mNm] The torque developed by the motor at zero speed (locked rotor) and nominal voltage. This value may vary due to the 4,5 S magnet V type and temperature and the temperature of the 4,5 37,7 Ω winding. 48 % Rotor inertia J [gcm2]...
Open the catalog to page 7
DC-Micromotors Technical Information Mechanical when choosing a precious metal commutated Please note, time constant τm [ms] The time required for the motor to reach a speed duty motor that they exhibit the best overall continuousof 63% of its final no-load speed, the point of highest efficiency. performance at or around from standstill. For continuous duty operating conditions that require the R·J = –––– motor to operate closemto its 2 kM thermal limits, a DC Motor with graphite commutation is recommended. shaft, bearing, lubrication, and commutation system or Housing material combinations with...
Open the catalog to page 8
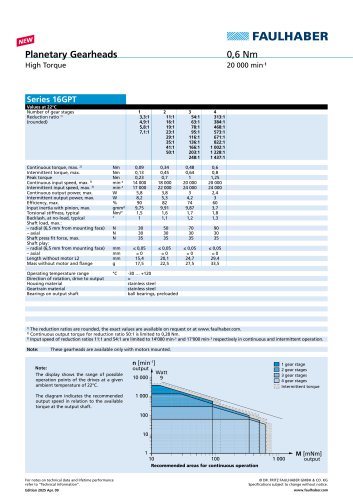
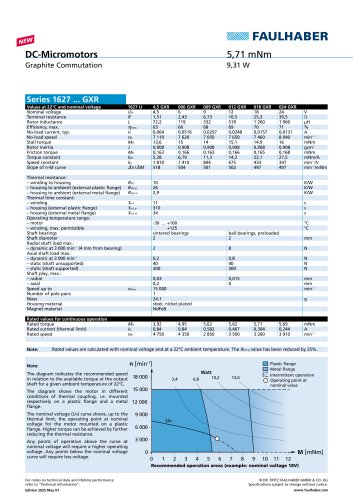
Explanations on the performance diagram The performance diagram shows the range of possible operating points of a drive at an ambient temperature of 22 °C and includes both the operation in the thermally insulated and in the cooled state. The possible speed ranges are shown in dependence on the shaft torque. The sector shown dashed describes possible operating points in which the drive can be engaged in intermittent operation or with increased cooling. Continuous torque Md [mNm] Describes the max. recommended continuous torque in the steady-state condition at nominal voltage and with thermal...
Open the catalog to page 9
DC-Micromotors Technical Information Mechanical time constant τ [ms] Performance characteristicsmat nominal voltage (24 V) The time presentation of the motor‘s characteristics A graphicrequired for the motor to reach a speed of 63% of its fi obtained by calculating standstill. can be nal no-load speed, from the stall current IH and the torque Mopt. at its point of max. efficiency. All other R·J m = –––– parameters are taken directly from the data sheet of the kM 2 selected motor. 2 Rotor inertia Stall current J [gcm ] The dynamic moment of inertia of the rotor. shaft, bearing, lubrication, and...
Open the catalog to page 10
DC-Micromotors Technical Information Calculation of the main parameters In this application the available supply voltage is lower than the nominal voltage of the selected motor. The calculation under load therefore is made at 20 V. Calculation of the operating point at 20 V When the torque (M = 3 mNm) at the working point is taken into consideration I, n, P2 and η can be calculated: Current at the operating point inserting the values Supply voltage Terminal resistance No-load current Torque constant Output power at the operating point P2 = M · 2 π · n Efficiency at the operating point In this...
Open the catalog to page 11
DC-Micromotors Technical Information Motor characteristic curves Mechanical time constant τm [ms] The a specific torque, the various to reach a speedbe read For time required for the motor parameters can of 63% of its final no-load speed, from standstill. on diagram 2. shaft, bearing, temperature of commutation system Estimating the lubrication, and the motor winding in or combinations with other components such as gearheads or operation: encoders that the motor operates to the a permissible To ensurewill all result in a change within no-load current of the motor. temperature range, it is necessary...
Open the catalog to page 12All FAULHABER Drive Systems catalogs and technical brochures
 FAULHABER nmotion 1/2026
FAULHABER nmotion 1/202648 Pages
 FAULHABER motion 2025
FAULHABER motion 202536 Pages
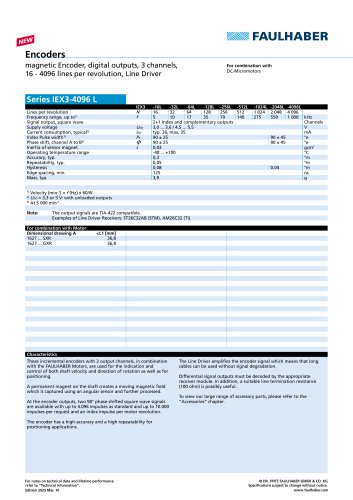 Encoders - Series IEX3- L
Encoders - Series IEX3- L2 Pages
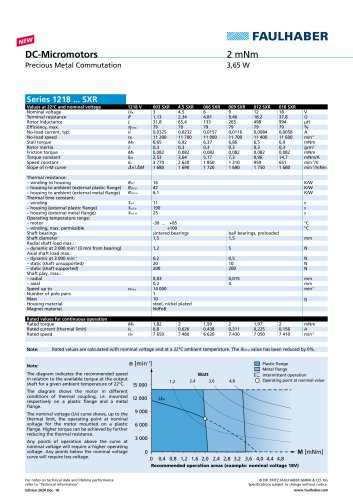 Series 1218 ... SXR
Series 1218 ... SXR2 Pages
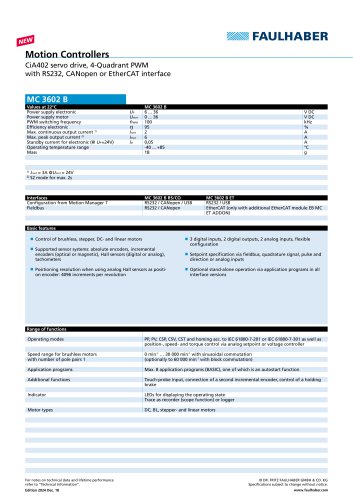 MC 3602 B
MC 3602 B2 Pages
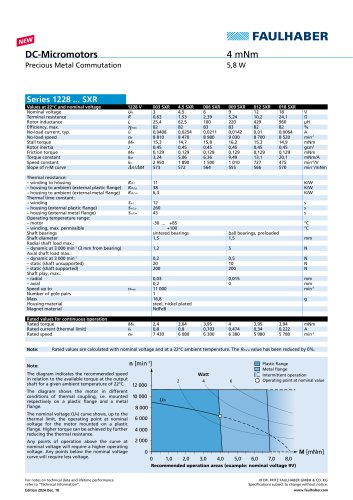 Series 1228 ... SXR
Series 1228 ... SXR2 Pages
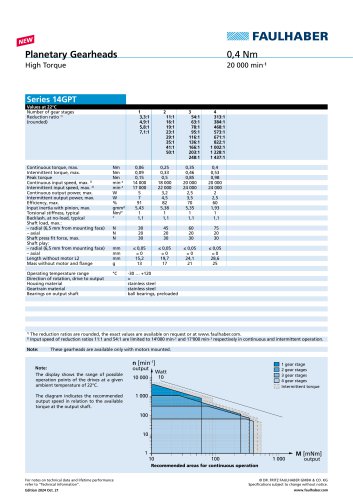 14GPT
14GPT2 Pages
 FAULHABER motio
FAULHABER motio36 Pages
 FAULHABER motion 1/2023
FAULHABER motion 1/202332 Pages
 Motion Controllers MC 3603 S
Motion Controllers MC 3603 S2 Pages
 FAULHABER motion 1/2021
FAULHABER motion 1/202124 Pages
 FAULHABER motion 2/2022
FAULHABER motion 2/202224 Pages
 Linear Actuators L series
Linear Actuators L series12 Pages
 FAULHABER motion 1/2022
FAULHABER motion 1/202233 Pages
 Faulhaber motion 02/2021
Faulhaber motion 02/202128 Pages
 The magazine with drive
The magazine with drive28 Pages
 motion 1/2020
motion 1/202032 Pages
 motion 2/2019
motion 2/201928 Pages
 FAULHABER motion 2/2017
FAULHABER motion 2/201728 Pages
 FAULHABER motion 1/2017
FAULHABER motion 1/201728 Pages
 motion the magazine with drive
motion the magazine with drive28 Pages
 Drives Systems
Drives Systems40 Pages
 motion the magazine with drive
motion the magazine with drive28 Pages
 The magazine with drive
The magazine with drive28 Pages
 EVOLUTION humanoids ROBOTICS
EVOLUTION humanoids ROBOTICS28 Pages
 TECHNOLOGY UNDER THE SKIN
TECHNOLOGY UNDER THE SKIN24 Pages















Archived catalogs
 The magazin with drive 1/2019
The magazin with drive 1/201928 Pages
 Drive Systems
Drive Systems521 Pages
 FAULHABER Info Issue 1/2013
FAULHABER Info Issue 1/201316 Pages
 news brochure
news brochure48 Pages
 FAULHABER info issue 1 / 2012
FAULHABER info issue 1 / 201220 Pages
 FAuLHABER info issue 2 / 2011
FAuLHABER info issue 2 / 201116 Pages
 FAULHABER info edition 1/2011
FAULHABER info edition 1/201116 Pages


- FAULHABER electric motor
- FAULHABER synchronous motor
- Actuator
- Alternating current motor
- Multipole motor
- Electric gearmotor
- Linear actuator
- FAULHABER rotary encoder
- Electric actuator
- FAULHABER planetary gear reducer
- FAULHABER coaxial gear reducer
- Incremental encoder
- Electromotor for industrial applications
- EC motor
- Precision gearhead
- 24 V motor
- Direct current gear-motor
- Compact gearhead