- Catalogs
- FAULHABER Drive Systems
- Stepper Motor Technical Note: Microstepping Myths and Realities
Stepper Motor Technical Note: Microstepping Myths and Realities
1 /5Pages

Stepper Motor Technical Note: Microstepping Myths and Realities
1 /5Pages
Catalog excerpts
FAULHABER Whitepaper Stepper Motor Technical Note: Microstepping Myths and Realities
Open the catalog to page 1
Stepper Motor Technical Note: Microstepping Myths and Realities The lure of Microstepping a two-phase stepper motor is compelling. Visions of Microstepping a 1,8-degree hybrid stepper motor with 256 microsteps per full step flash in your mind. The resolution of 51.200 microsteps per revolution entices you. You’re glad you don’t own stock in high- resolution encoder companies. Publisher / Editor: DR. FRITZ FAULHABER GMBH & CO. KG Schönaich · Germany Email: [email protected] www.faulhaber.com © DR. FRITZ FAULHABER GMBH & CO. KG · 2020_05 · Specifications subject to change without notice · See also...
Open the catalog to page 2
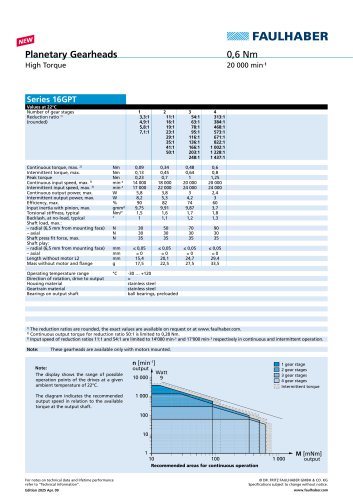
Stepper Motor Technical Note: Microstepping Myths and Realities Torque vs. shaft position Equilibrium position θ [rad] Dotted line: Suitable response for precise microstepping positioning. Blue line: Distorted curves. The actual expression for incremental torque for a single microstep is 1.: The real compromise is that as you increase the number of microsteps per full step, the INCREMENTAL torque per microstep drops off drastically. Resolution increases. However, accuracy will suffer. Few stepper motors have a pure sinusoidal torque vs. shaft position and all have The incremental torque for N...
Open the catalog to page 3
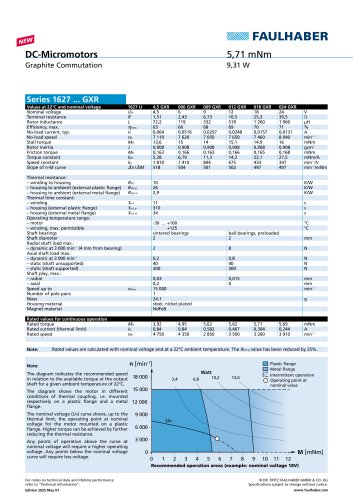
Stepper Motor Technical Note: Microstepping Myths and Realities Incremental Torque per Microstep/Full Step % of Full Step Holding Torque. at 16 Microsteps per Full Step the Incremental Torque for one Microstep is less than 10% of the Full Step Holding Torque Microsteps per Full Step Table 1 dramatically quantifies the significant impact on the incremental torque per microstep as a function of the number of microsteps per full step. A full step is considered one microstep per full step for Equations 1 and 2. Incremental Torque per Microstep As the Number of Microsteps per Full Step Increase What...
Open the catalog to page 4
Stepper Motor Technical Note: Microstepping Myths and Realities What if the motor is not loaded? Thinking of using microstepping for some type of pointing or inertial There are still compelling reasons other than positioning? Well, the stepper motor still has friction high resolution for microstepping. They include: torque due to its bearings and it has a detent torque (in reduced Mechanical Noise addition to other harmonic distortions). You’ll have to gentler Actuation Mechanically “wind up” enough incremental torque to overcome the reduces Resonances Problems bearing friction. Even more disruptive...
Open the catalog to page 5All FAULHABER Drive Systems catalogs and technical brochures
 FAULHABER nmotion 1/2026
FAULHABER nmotion 1/202648 Pages
 FAULHABER motion 2025
FAULHABER motion 202536 Pages
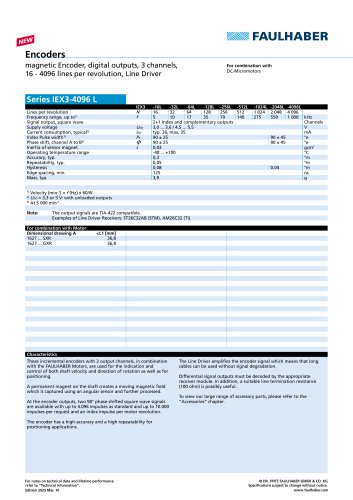 Encoders - Series IEX3- L
Encoders - Series IEX3- L2 Pages
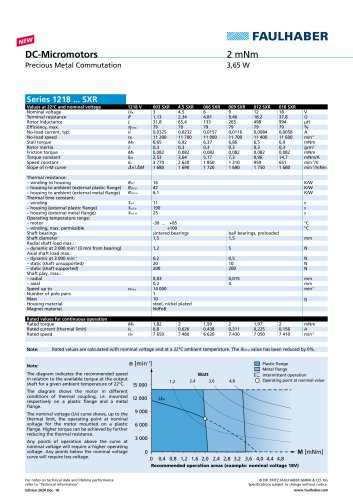 Series 1218 ... SXR
Series 1218 ... SXR2 Pages
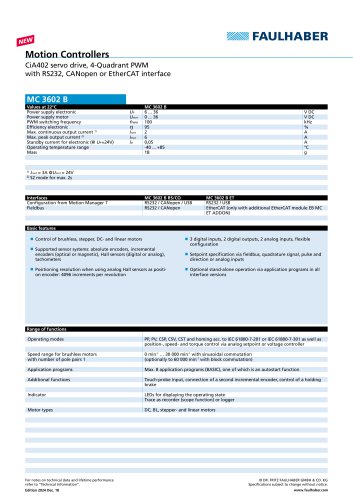 MC 3602 B
MC 3602 B2 Pages
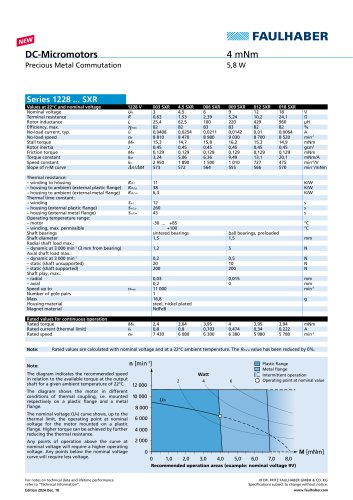 Series 1228 ... SXR
Series 1228 ... SXR2 Pages
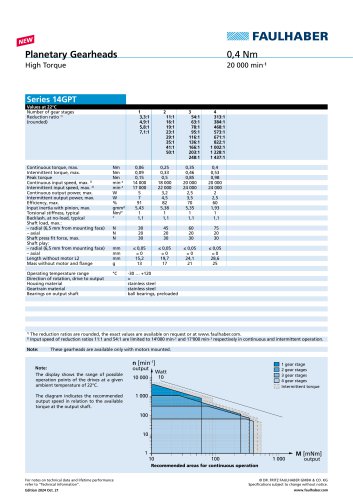 14GPT
14GPT2 Pages
 FAULHABER motio
FAULHABER motio36 Pages
 FAULHABER motion 1/2023
FAULHABER motion 1/202332 Pages
 Motion Controllers MC 3603 S
Motion Controllers MC 3603 S2 Pages
 FAULHABER motion 1/2021
FAULHABER motion 1/202124 Pages
 FAULHABER motion 2/2022
FAULHABER motion 2/202224 Pages
 Linear Actuators L series
Linear Actuators L series12 Pages
 FAULHABER motion 1/2022
FAULHABER motion 1/202233 Pages
 Faulhaber motion 02/2021
Faulhaber motion 02/202128 Pages
 The magazine with drive
The magazine with drive28 Pages
 motion 1/2020
motion 1/202032 Pages
 Technical Information
Technical Information162 Pages
 motion 2/2019
motion 2/201928 Pages
 FAULHABER motion 2/2017
FAULHABER motion 2/201728 Pages
 FAULHABER motion 1/2017
FAULHABER motion 1/201728 Pages
 motion the magazine with drive
motion the magazine with drive28 Pages
 Drives Systems
Drives Systems40 Pages
 motion the magazine with drive
motion the magazine with drive28 Pages
 The magazine with drive
The magazine with drive28 Pages
 EVOLUTION humanoids ROBOTICS
EVOLUTION humanoids ROBOTICS28 Pages
 TECHNOLOGY UNDER THE SKIN
TECHNOLOGY UNDER THE SKIN24 Pages














Archived catalogs
 The magazin with drive 1/2019
The magazin with drive 1/201928 Pages
 Drive Systems
Drive Systems521 Pages
 FAULHABER Info Issue 1/2013
FAULHABER Info Issue 1/201316 Pages
 news brochure
news brochure48 Pages
 FAULHABER info issue 1 / 2012
FAULHABER info issue 1 / 201220 Pages
 FAuLHABER info issue 2 / 2011
FAuLHABER info issue 2 / 201116 Pages
 FAULHABER info edition 1/2011
FAULHABER info edition 1/201116 Pages


- FAULHABER electric motor
- FAULHABER DC motor
- FAULHABER synchronous motor
- Actuator
- Alternating current motor
- Multipole motor
- Electric gearmotor
- Linear actuator
- FAULHABER rotary encoder
- Electric actuator
- FAULHABER planetary gear reducer
- FAULHABER coaxial gear reducer
- Incremental encoder
- Electromotor for industrial applications
- EC motor
- Precision gearhead
- 24 V motor
- Direct current gear-motor
- Compact gearhead
- FAULHABER servomotor