- Catalogs
- esitron-electronic
- esiMot SL series 400 V AC (3,1 - 4,4 KW)
- Company
- Products
- Catalogs
- News & Trends
- Exhibitions
esiMot SL series 400 V AC (3,1 - 4,4 KW)
1 /4Pages

esiMot SL series 400 V AC (3,1 - 4,4 KW)
1 /4Pages
Catalog excerpts

esiMot SL Decentral Servo - Drive Brushless servo-motor with integrated electronics Positioning and speed-/torque regulator mode Digital 4-Q regulator Direct status- and diagnostics function through LED's Digital In- and Outputs (24V) RS232 for parameter setting Motor supply 400V AC, 50/60Hz Inegrated ballast circuit with resistor Separate logic supply 24V, wrong polarity protected Order options: all-in-one Servomotor High Dynamic 2,9 - 4,4kWS3 Set value analog +/- 10V DC / 0 ... 10 V DC with direction signal 0/4 ... 20 mA Recordable motion data (PLC-interface) Galvanically insulated fieldbus interface: Profibus-DP PROFINET CANopen DSP402 Modbus RS485 EtherCAT CoE Via switch adjustable bus address/baud rate Safe Torque Off Category 3 Performance Level e Multiturn absolute encoder internal Connection to external EnDAT2.2 encoder Standstill brake Planetary and worm gearboxes
Open the catalog to page 1
CANopen DSP402 Profibus-DP PROFINET RS485 EtherCAT Digital I/O, 24V Signals Integrated servo-amplifier Integrated positioning logic (position loop) Digital 4Q speed and torque regulator Position acquisition** - Resolver - Absolute encoder multi-turn Fieldbusses (see order code) Analog set value Digital inputs Digital outputs Encoder output A/B/0 24V Integrated ballast circuit and -resistor Connection for external ballast resistor Wrong polarity protection Safe Torque Off EN 13849-1 Cat. 3 PL e Stand still brake RS232 Programming interface (19,2kBaud) With Fieldbus Status LEDs Signalling e.g....
Open the catalog to page 2
Without Fieldbus Open Loop +/- 10V 0...10V + Direction; 0(4)...20mA Start** Set selection** Reference switch** Limit switch** Brake** Position reached** M-Function** Ready** A/B/0 +24V Amplifier mode Speed- and torque regulator Closed Loop Positioning mode (positioning loop) Speed and torque regulation With Fieldbus esiMot xx/x.3-7xx CANopen DSP402 Profibus-DP PROFINET EtherCAT RS485 Enable** Limit switch** Stop** Positioning** Programm end** M 3 **) Example connection; other I/O-Functions are assignable. Positioning mode (positioning loop) Speed and torque regulation Sample-Driveprofile: Record...
Open the catalog to page 3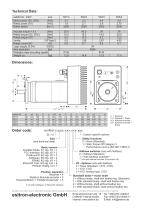
Technical Data: esiMot SL 400V Motor power (S3, 25%) Rated power (S1) Rated speed Impulse torque < 5 s [Nm] Rated torque (S3, 25%) [Nm] Rated torque (S1) [Nm] Inertia [10-3kgm²] Rated current AC [A] Logic supply (0,3A) [VDC] Axis resolution [lpr] Protection class (mounting specific) Weight ca. [kg] Order code: Resolver Resolver + Brake Absolute encoder Absolute encoder + Brake esiMot x xx/x.xxx.xxx.xxx SL = 5 Size (see technical data) Basic version Amplifier-Mode, 4/1 dig. I/O = 1 PLC-Interface, 8/2 dig. I/O = 2 Profibus-DP, 8/2 dig. I/O = 3 CANopen, 8/2 dig. I/O = 4 RS485, 8/2 dig. I/O = 5 EtherCAT...
Open the catalog to page 4All Esitron-electronic catalogs and technical brochures
 DMD128_EN
DMD128_EN2 Pages
 Display module DM 6
Display module DM 62 Pages
 DM100 Prozessanzeige
DM100 Prozessanzeige2 Pages
 SK20
SK202 Pages
 ServoController SC8
ServoController SC84 Pages
 PGB040 ... 155
PGB040 ... 1554 Pages
 SK40.2
SK40.22 Pages
 Position display AM 10
Position display AM 102 Pages
 SK30
SK302 Pages
 FRT 28 / 40 / 50 / 60
FRT 28 / 40 / 50 / 606 Pages
 PGA52/PGA60
PGA52/PGA602 Pages
 APS -System
APS -System4 Pages
 Large Display module DM 57
Large Display module DM 572 Pages
 DM100 series
DM100 series2 Pages
 SBL series
SBL series6 Pages
 Drive Technology:ESY series
Drive Technology:ESY series26 Pages
 Signal converter SK 30
Signal converter SK 302 Pages
 Cam Controller DNS 20
Cam Controller DNS 202 Pages
 Cam Controller CC 8 / CC16
Cam Controller CC 8 / CC162 Pages










- Display module
- Industrial display panel
- Color display panel
- Right angle gearhead
- Digital indicator
- LED display panel
- Hollow-shaft gearhead
- Panel panel meter
- Gearbox for industrial applications
- Servo-amplifier
- Electronic display panel
- AC servo-motor
- Control display system
- Programmable display system
- Information display
- DC servo-amplifier
- Built-in display
- Fieldbus servo-drive