- Catalogs
- esd electronics gmbh
- Data Sheet EtherCAT MainDevice Stack
- Company
- Products
- Catalogs
- News & Trends
- Exhibitions
Data Sheet EtherCAT MainDevice Stack
1 /1Page
Data Sheet EtherCAT MainDevice Stack
1 /1Page
Catalog excerpts

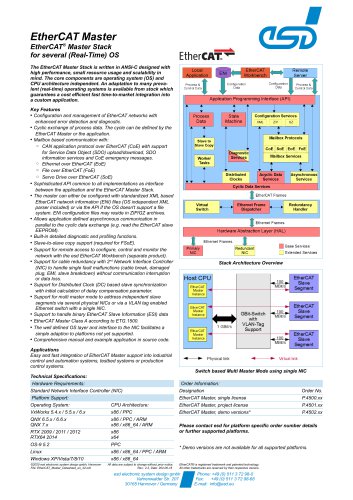
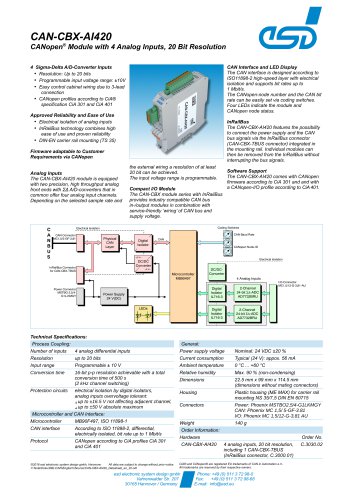
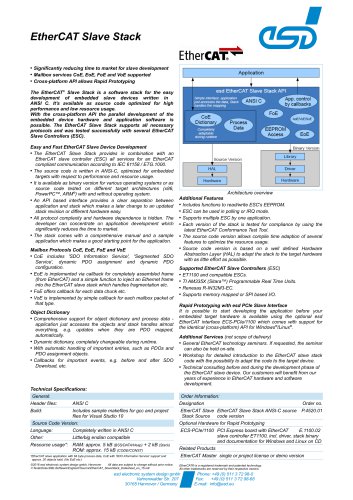
EtherCAT Master EtherCAT® Master Stack for several (Real-Time) OS The EtherCAT Master Stack is written in ANSI-C designed with high performance, small resource usage and scalability in mind. The core components are operating system (OS) and CPU architecture independent. An adaptation to many prevalent (real-time) operating systems is available from stock which guarantees a cost efficient fast time-to-market integration into a custom application. Key Features • Configuration and management of EtherCAT networks with enhanced error detection and diagnostic. • Cyclic exchange of process data. The cycle can be defined by the EtherCAT Master or the application. • Mailbox based communication with: ◦ CAN application protocol over EtherCAT (CoE) with support for Service Data Object (SDO) upload/download, SDO information services and CoE emergency messages. ◦ Ethernet over EtherCAT (EoE) ◦ File over EtherCAT (FoE) ◦ Servo Drive over EtherCAT (SoE) • Sophisticated API common to all implementations as interface between the application and the EtherCAT Master Stack. • The master can either be configured with standardized XML based EtherCAT network information (ENI) files (OS independent XML parser included) or via the API if the OS doesn't support a file system. ENI configuration files may reside in ZIP/GZ archives. • Allows application defined asynchronous communication in parallel to the cyclic data exchange (e.g. read the EtherCAT slave EEPROM). • Built-in detailed diagnostic and profiling functions. • Slave-to-slave copy support (required for FSoE). • Support for remote access to configure, control and monitor the network with the esd EtherCAT Workbench (separate product). • Support for cable redundancy with 2nd Network Interface Controller (NIC) to handle single fault malfunctions (cable break, damaged plug, EMI, slave breakdown) without communication interruption or data loss. • Support for Distributed Clock (DC) based slave synchronization with initial calculation of delay compensation parameter. • Support for multi master mode to address independent slave segments via several physical NICs or via a VLAN tag enabled Ethernet switch with a single NIC. • Support to handle binary EtherCAT Slave Information (ESI) data • EtherCAT Master Class A according to ETG.1500. • The well defined OS layer and interface to the NIC facilitates a simple adaption to platforms not yet supported. • Comprehensive manual and example application in source code. Stack Architecture Overview Applications Easy and fast integration of EtherCAT Master support into industrial control and automation systems, testbed systems or production control systems. Technical Specifications: Hardware Requirements: Standard Network Interface Controller (NIC) Platform Support: Operating System: CPU Architecture: VxWorks 5.4.x / 5.5.x / 6.x x86 / PPC Switch based Multi Master Mode using single NIC Order Information: Designation EtherCAT Master, single license EtherCAT Master, project license EtherCAT Master, demo versions* Please contact esd for platform specific order number details or further supported platforms. * Demo versions are not available for all supported platforms. Windows XP/Vista/7/8/10 ©2020 esd electronic system design gmbh, Hannover File: EtherCAT_Master_Datasheet_en_22.odt x86 / x86_64 All data are subject to change without prior notice. Rev.: 2.2, Date: 202-06-18 EtherCAT® is registered trademark and patented technology. All other trademarks are reserved by their respective owners. esd electronic system design gmbh Vahrenwalder Str. 207 30165 Hannover / Germany
Open the catalog to page 1All Esd electronics gmbh catalogs and technical brochures
 Data Sheet ARINC825
Data Sheet ARINC8252 Pages
 Data Sheet J1939 Stack
Data Sheet J1939 Stack1 Page
 CAN-OPC UA Server
CAN-OPC UA Server1 Page
 Data Sheet VME-CPU/T10
Data Sheet VME-CPU/T102 Pages
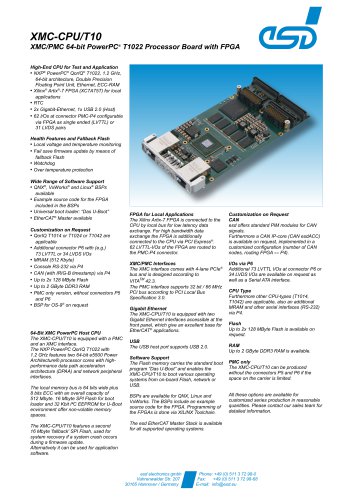 Data Sheet XMC-CPU/T10
Data Sheet XMC-CPU/T102 Pages
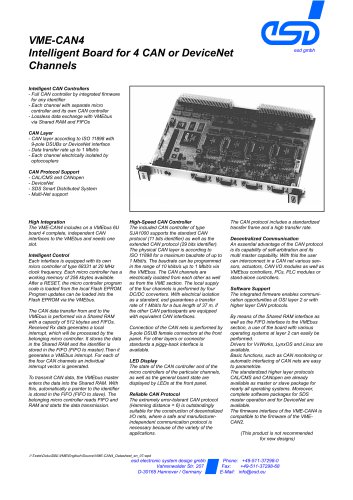 Data Sheet VME-CAN4
Data Sheet VME-CAN42 Pages
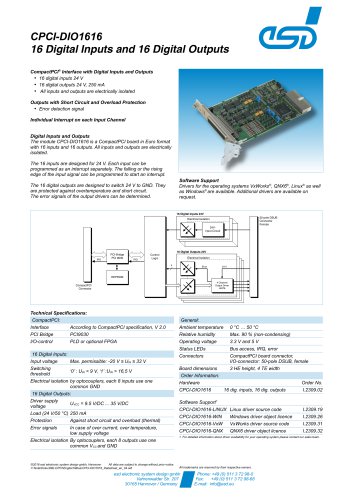 Data Sheet CPCI-DIO1616
Data Sheet CPCI-DIO16161 Page
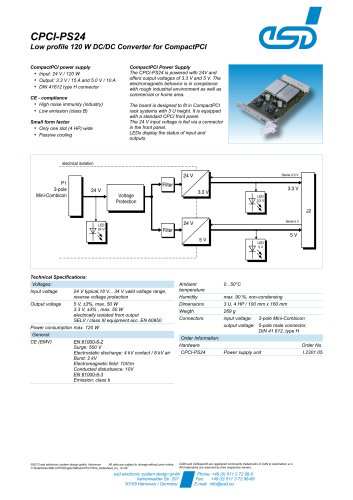 Data Sheet CPCI-PS24
Data Sheet CPCI-PS241 Page
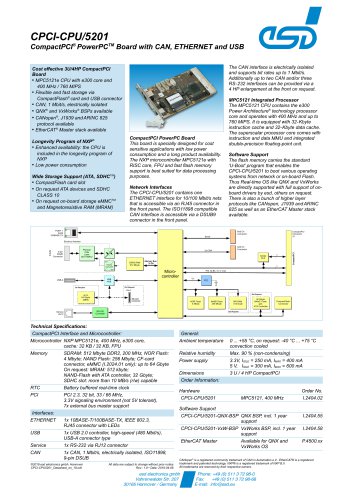 Data Sheet CPCI-CPU/5201
Data Sheet CPCI-CPU/52011 Page
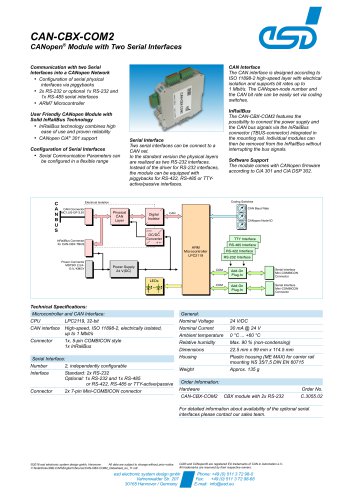 Data Sheet CAN-CBX-COM2
Data Sheet CAN-CBX-COM21 Page
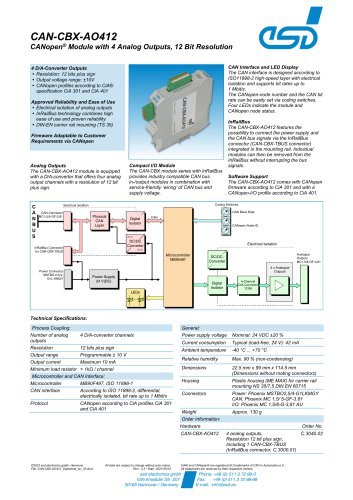 Data Sheet CAN-CBX-AO412
Data Sheet CAN-CBX-AO4121 Page
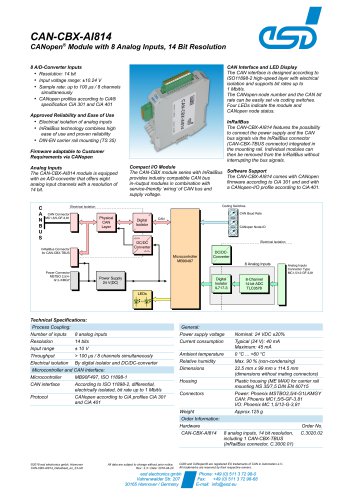 Data Sheet CAN-CBX-AI814
Data Sheet CAN-CBX-AI8141 Page
 Data Sheet CAN-CBX-AI420
Data Sheet CAN-CBX-AI4201 Page
 Data Sheet CAN-CBX-DIO8
Data Sheet CAN-CBX-DIO81 Page
 Data Sheet DN-DP
Data Sheet DN-DP1 Page
 Data Sheet CANopen-PN/2
Data Sheet CANopen-PN/21 Page
 Data Sheet CAN-PN/2
Data Sheet CAN-PN/21 Page
 Data Sheet CANopen-DP/2
Data Sheet CANopen-DP/21 Page
 Data Sheet CAN-DP/2
Data Sheet CAN-DP/21 Page
 Data Sheet EtherCAN/3-FD
Data Sheet EtherCAN/3-FD2 Pages
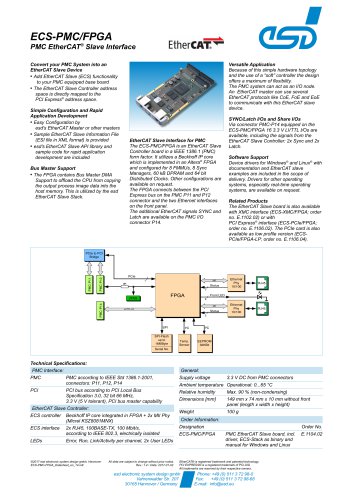 Data Sheet ECS-PMC/FPGA
Data Sheet ECS-PMC/FPGA1 Page
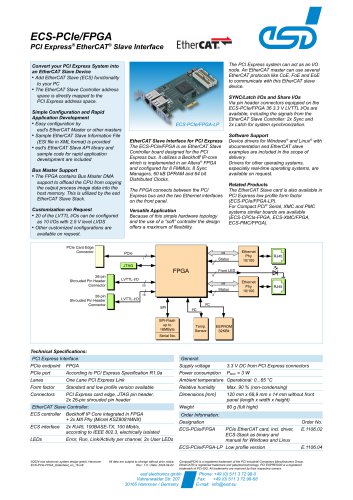 Data Sheet ECS-PCIe/FPGA
Data Sheet ECS-PCIe/FPGA1 Page
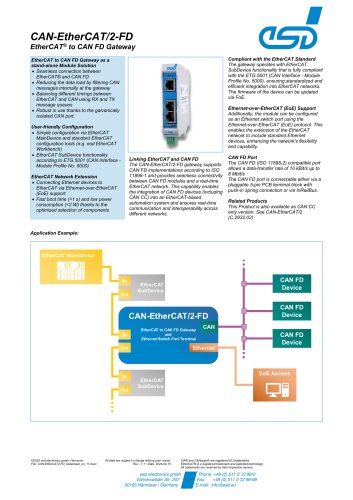 Data Sheet CAN-EtherCAT/2-FD
Data Sheet CAN-EtherCAT/2-FD2 Pages
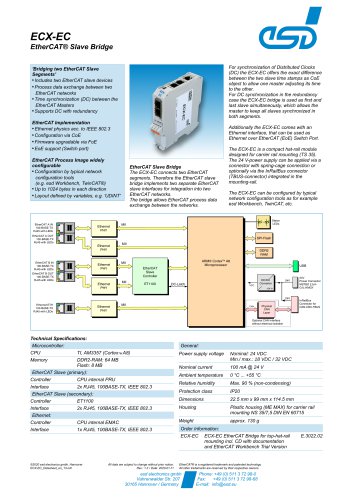 Data Sheet ECX-EC
Data Sheet ECX-EC1 Page
 Data Sheet ECX-DIO8
Data Sheet ECX-DIO81 Page
 Data Sheet ECS-M.2/FPGA
Data Sheet ECS-M.2/FPGA1 Page
 Data Sheet CAN-USB/3-FD
Data Sheet CAN-USB/3-FD1 Page
 Products Catalog 2025
Products Catalog 202556 Pages
 CPCIserial-CAN/402-4-FD
CPCIserial-CAN/402-4-FD2 Pages
 CPCI-CAN/402-4(-FD)
CPCI-CAN/402-4(-FD)2 Pages
 CAN Cables and Accessories
CAN Cables and Accessories2 Pages
 CAN-USB/400-FD
CAN-USB/400-FD2 Pages
 EPPC-T10
EPPC-T102 Pages
 Switch16/Com3
Switch16/Com31 Page
 XMC-CPU/Zulu
XMC-CPU/Zulu2 Pages
 CANopen-PN
CANopen-PN1 Page
 XMC-CAN/402-4-FD
XMC-CAN/402-4-FD2 Pages
 PMC-CAN/402-4-FD
PMC-CAN/402-4-FD2 Pages
 CAN-PCIeMini/402-2(-FD)
CAN-PCIeMini/402-2(-FD)2 Pages
 CAN-PCIe/402-FD
CAN-PCIe/402-FD2 Pages
 PMC-CPU/405
PMC-CPU/4051 Page
 CPCIserial-CAN/402
CPCIserial-CAN/4022 Pages
 CAN-USB/400
CAN-USB/4002 Pages
 ECS-XMC/FPGA
ECS-XMC/FPGA1 Page
- Electrical cable
- Ethernet switch
- Automation software solution
- Industrial network switch
- Analysis software solution
- Digital I/O
- Process software
- Windows software
- Real-time software
- IO module
- Cloud-based software
- Managed switch
- Control software
- Analog I/O
- DIN rail mounted network switch
- RJ45 network switch
- Electrical data cable
- Digital IO module
- Monitoring software solution
- Industrial software