- Company
- Products
- Catalogs
- News & Trends
- Exhibitions
MEM-Bus EtherCAT®
1 /2Pages

MEM-Bus EtherCAT®
1 /2Pages
Catalog excerpts

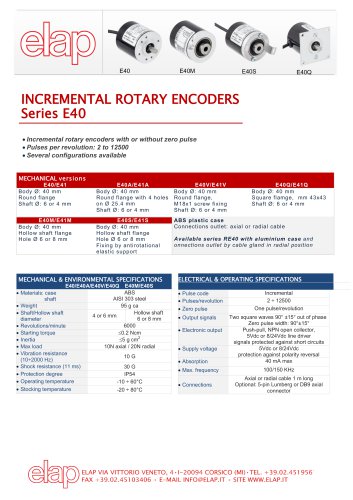
► ABSOLUTE ENCODERS WITH FIELDBUS INTERFACE |MEM620-BUS i Square flange 63.5x63.5 mm Round flange 0 58 mm Round flange 0 58 mm Blind hollow shaft for motor coupling Blind hollow shaft, fixing by elastic support ► EtherCAT COMMUNICATION PROTOCOL Based on the industrial Ethernet communication protocol, the EtherCAT® interface is steady, flexible and fast, therefore particularly suitable for communication between control systems and peripheral devices, such as I/O systems, drives, sensors and actuators. MEM-BUS EtherCAT® encoders offer: • Real Time communication • Flexible number of nodes • Easy installation and maintainance • Net topologies configuration • Automatic slaves addressing • Flexible work ranges progamming EtherCAT^ Conformance tested ► ELECTRICAL & OPERATING SPECIFICATIONS MEM540-BUS_ECT_M_6 |mEM-BUS EtherCAT ENCODER PROFILE j • Ref IEC61158-1-6 & IEC61784-2 • Device Profile CANopen over EtherCAT (CoE), CiA DS-406 • Physical Layer: EtherCAT 100Base-TX, Fast Ethernet, ISO/IEC 8802-3 • Output code: Binary • Cycle time > 1 ms • Transmission rate 100 Mbit/s • Transmission: CAT-5 cable, shielded (STP), ISO/IEC 11801 Connectors IN and OUT SUPPLY CONNECTOR M12 female type, D code M12 male type, A code • Counting direction • Preset value • Measuring steps per revolution • Speed resolution • Total measuring length in steps MEM-BUS EtherCAT supports different operating modes: • Free-Run: The slave application is not synchronized to EtherCAT. The local cycle is started by the local timer interrupt of the application controller. The cycle time can be modified by the Master, but this is a local cycle and it does not depend on communication and on Master cycle. • SM3 Event: The slave application is synchronized to the SM3 Event (that is the cyclic inputs transmission to the Master). SM events are based on the time an EtherCAT frame is received. This time can jitter in the range of a few microseconds due to the EtherCAT Master implementation (delay in stack, PHY & MAC delay, etc.). • DC: The slave application is synchronized to the SYNC0 event, which is based on the Distributed Clocks Unit (DC). The jitter can be reduced to a few nanoseconds. • The DC mode grants high real-time performances * Elap reserves the right
Open the catalog to page 1
EtherCAT. Conformance tested ‘AVAILABLE SHAFT DIAMETERS 8 - 10 length 20mm 6 length 10mm ‘AVAILABLE SHAFT DIAMETERS 8 - 10 length 20mm 6 length 10mm ‘AVAILABLE SHAFT DIAMETERS 8 - 10 length 20mm 6 length 10mm absolute encoder WITH FIELDBUS INTERFACE Via Vittorio Veneto, 4 - 20094 Corsico (Mi) tel. +39 02 451.95.61 - fax +39 02 45.10.34.06 [email protected] - www.elap.it
Open the catalog to page 2All ELAP catalogs and technical brochures
 RE40 Incremental encoder
RE40 Incremental encoder4 Pages
 SSI Absolute Encoders MEM
SSI Absolute Encoders MEM2 Pages
 ABSOLUTE & INCREMENTAL ENCODERS
ABSOLUTE & INCREMENTAL ENCODERS20 Pages
 PD - PE Linear transducers
PD - PE Linear transducers2 Pages
 Linear potentiometers
Linear potentiometers12 Pages
 MEM-Bus Profibus Encoder
MEM-Bus Profibus Encoder2 Pages
 VD3 Digital Visualiser
VD3 Digital Visualiser1 Page
 MEM-Bus Profinet Encoder
MEM-Bus Profinet Encoder2 Pages
 MEM-Bus EtherNet/IP Encoders
MEM-Bus EtherNet/IP Encoders2 Pages
 HLS Wire Encoder
HLS Wire Encoder2 Pages
 HPS Wire Potentiometer
HPS Wire Potentiometer2 Pages
 KP Optical linear scale
KP Optical linear scale2 Pages
 KD Optical scale
KD Optical scale2 Pages
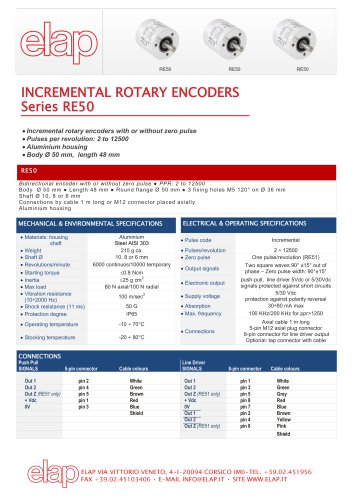 RE50 Incremental encoder
RE50 Incremental encoder2 Pages
 General Catalogue
General Catalogue12 Pages
 REV incremental encoders
REV incremental encoders4 Pages
 VD4 Digital Readout
VD4 Digital Readout2 Pages



















Archived catalogs
- Angular encoder
- Incremental encoder
- Incremental rotary encoder
- Digital indicator
- Absolute rotary encoder
- Panel panel meter
- Position transducer
- Solid-shaft rotary encoder
- Optical rotary encoder
- Hollow-shaft rotary encoder
- Linear position transmitter
- Magnetic rotary encoder
- Industrial rotary encoder
- Displacement transducer
- Linear displacement sensor
- IP67 rotary encoder
- Compact rotary encoder
- Analog position transducer
- IP65 rotary encoder
- DC rotary encoder