MLDT Sensor
MLDT Sensor
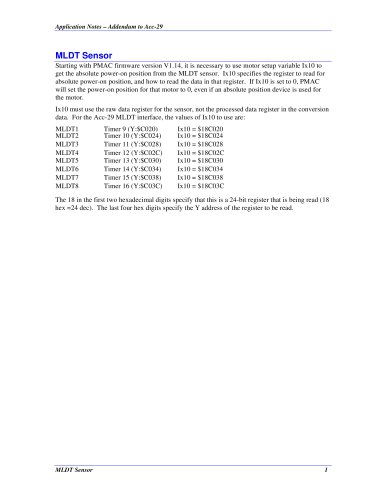
This document serves as an addendum to the Acc-29, focusing on the MLDT Sensor and its integration with PMAC firmware version V1.14. It outlines the necessary configuration for obtaining the absolute power-on position from the MLDT sensor using the motor setup variable Ix10.
Starting with PMAC firmware version V1.14, the motor setup variable Ix10 is required to retrieve the absolute power-on position from the MLDT sensor. Ix10 determines the register to read and the method of data retrieval. If Ix10 is set to 0, the power-on position defaults to 0, regardless of the presence of an absolute position device.
Ix10 must reference the raw data register of the sensor, not the processed data register. The specific values for Ix10 for the Acc-29 MLDT interface are provided for different timers:
- MLDT1 Timer 9: Ix10 = $18C020
- MLDT2 Timer 10: Ix10 = $18C024
- MLDT3 Timer 11: Ix10 = $18C028
- MLDT4 Timer 12: Ix10 = $18C02C
- MLDT5 Timer 13: Ix10 = $18C030
- MLDT6 Timer 14: Ix10 = $18C034
- MLDT7 Timer 15: Ix10 = $18C038
- MLDT8 Timer 16: Ix10 = $18C03C
This addendum provides essential information for configuring the MLDT sensor with PMAC firmware version V1.14, ensuring accurate retrieval of the absolute power-on position through the correct setup of the Ix10 variable.
Catalog excerpts

Application Notes Addendum to Acc-29 Starting with PMAC firmware version V1.14, it is necessary to use motor setup variable Ix10 to get the absolute power-on position from the MLDT sensor. Ix10 specifies the register to read for absolute power-on position, and how to read the data in that register. If Ix10 is set to 0, PMAC will set the power-on position for that motor to 0, even if an absolute position device is used for the motor. Ix10 must use the raw data register for the sensor, not the processed data register in the conversion data. For the Acc-29 MLDT interface, the values of Ix10 to use are: MLDT1 Timer 9 ( Y: $ C020 ) Ix10 = $ 18C020MLDT2 Timer 10 (Y:$C024) Ix10 = $18C024 MLDT3 Timer 11 (Y:$C028) Ix10 = $18C028 MLDT4 Timer 12 ( Y:$C02C ) Ix10 = $18C02CMLDT5 Timer 13 (Y:$C030) Ix10 = $18C030 MLDT6 Timer 14 (Y:$C034) Ix10 = $18C034 MLDT7 Timer 15 (Y:$C038) Ix10 = $18C038 MLDT8 Timer 16 (Y:$C03C) Ix10 = $18C03C The 18 in the first two hexadecimal digits specify that this is a 24-bit register that is being read (18 hex =24 dec). The last four hex digits specify the Y address of the register to be read. > MLDT Sensor 1 size="-1">
Open the catalog to page 1All Delta Tau catalogs and technical brochures
 Digital Counter/Tachometer H7CC
Digital Counter/Tachometer H7CC64 Pages
 TURBO PMAC2 VME ULTRALITE
TURBO PMAC2 VME ULTRALITE7 Pages
 TURBO PMAC2 REALTIME EXPRESS
TURBO PMAC2 REALTIME EXPRESS3 Pages
 TURBO PMAC2 PCI
TURBO PMAC2 PCI7 Pages
 TURBO PMAC VME
TURBO PMAC VME6 Pages
 POWER UMAC CPU 256 Axis
POWER UMAC CPU 256 Axis4 Pages
 3U042
3U0424 Pages
 3U081
3U0814 Pages
 3U151
3U1514 Pages
 ACC-8D OPT4
ACC-8D OPT43 Pages
 ACC-8D OPT4A
ACC-8D OPT4A3 Pages
 ADVANTAGE 900 BASIC PACKAGE
ADVANTAGE 900 BASIC PACKAGE3 Pages
 PMAC MINI PCI 8 Axis
PMAC MINI PCI 8 Axis7 Pages
 PMAC PCI 8 Axis
PMAC PCI 8 Axis7 Pages
 PMAC PCI LITE 8 Axis
PMAC PCI LITE 8 Axis7 Pages
 PMAC VME 8 Axis
PMAC VME 8 Axis6 Pages
 PMAC2A PC/104
PMAC2A PC/1046 Pages
 POWER UMAC
POWER UMAC4 Pages
 TURBO UMAC
TURBO UMAC6 Pages
 PMAC-NC PRO2 RUNTIME
PMAC-NC PRO2 RUNTIME3 Pages
 Turbo Clipper Drive
Turbo Clipper Drive2 Pages
 Battery Issues with PMAC ISA
Battery Issues with PMAC ISA5 Pages
 Digital IO accessories
Digital IO accessories2 Pages
 Slow communications
Slow communications1 Page











- Servo-amplifier
- Remote I/O
- DC servo-amplifier
- Digital counter
- AC servo-amplifier
- Brushless servo drive
- Digital servo-amplifier
- Electronic counter
- Electronic amplifier
- Multi-axis positioning controller
- CNC
- Current amplifier
- Ethernet positioning controller
- DC motion controller
- EtherCAT positioning controller
- Compact motion control card
- PWM servo-drive
- I/O system
- Servomotor positioning controller
- Integrated positioning controller