- Company
- Products
- Catalogs
- News & Trends
- Exhibitions
ROBOTIC MOTOR SOLUTION
1 /76Pages
ROBOTIC MOTOR SOLUTION
1 /76Pages
Catalog excerpts
AGV EXOSKELETON ROBOT ARM LEGGED ROBOT
Open the catalog to page 1
CUBEMARS MOTIVATE ADVANCED ROBOTIC SYSTEM
Open the catalog to page 2
Highly Integrated Actuator AK Series P02-13 AKE Series P14-17 AKA Series P18-20 Frameless Motor RI Series RI-PH Series RO Series RO LITE Series Outrunner Torque Motor R Series P39-42 Gimbal Motor G Series P43-52 GL Series P53-63 Underwater Thruster W Series P64-66 SW Series P67-69 DW Series P70-73
Open the catalog to page 3
product drawing analytical graph of motor operation specifications CubeMars-Advanced Power Pioneer Application Driving way Operation ambient temperature Winding type Insulation class Insulation High-voltage Insulation resistance Foot Robots, Exoskeleton Robots, AGV Pole pairs Reduction ratio Back drive(Nm) Temperature sensor Noise dB 65CM away the motor (Environment 45dB@1200rpm) Basic load rating (dyn. Cr) N Basic load ratings (stat. C0r) N electric parameters Rated voltage (V) 24/48 POWER+CAN connector UART connector Inner loop encoder type Phase to Phase resistance (mQ) 595 Phase to Phase...
Open the catalog to page 5
product drawing analytical graph of motor operation Operation ambient temperature Winding type Insulation class Insulation High-voltage Insulation resistance Foot Robots, Exoskeleton Robots, AGV Pole pairs Reduction ratio Back drive(Nm) Temperature sensor Noise dB 65CM away the motor (Environment 45dB@1200rpm) Basic load rating (dyn. Cr) N Basic load ratings (stat. C0r) N electric parameters Phase to Phase resistance (mQ) 248 Phase to Phase inductance (pH) 213 Mechanical time constant (ms) 0.5 Electrical time constant (ms) 0.93 Maximum torque weight ratio (Nm/kg) 86 CubeMars-Advanced Power Pioneer...
Open the catalog to page 6
product drawing analytical graph of motor operation specifications CubeMars-Advanced Power Pioneer Application Driving way Operation ambient temperature Winding type Insulation class Insulation High-voltage Insulation resistance Legged Robot,Exoskeleton, AGV FOC -20°C~50°C Star C Pole pairs Reduction ratio Back drive(Nm) Temperature sensor Noise dB 65CM away the motor (Environment 45dB@1200rpm) Basic load rating (dyn. Cr) N Basic load ratings (stat. C0r) N electric parameters Rated voltage (V) 24 CAN connector UART connector Power connector Inner loop encoder type Phase to Phase resistance (mQ)...
Open the catalog to page 7
product drawing analytical graph of motor operation Operation ambient temperature Winding type Insulation class Insulation High-voltage Insulation resistance Legged Robot,Exoskeleton,AGV FOC -20°050°C Delta C Pole pairs Reduction ratio Back drive(Nm) Temperature sensor Noise dB 65CM away the motor (Environment 45dB@1200rpm) Basic load rating (dyn. Cr) N Basic load ratings (stat. C0r) N electric parameters Phase to Phase resistance [mO] 202 Phase to Phase inductance (pH) 138 Mechanical time constant (ms) 0.81 Electrical time constant (ms) 0.68 Maximum torque weight ratio (Nm/kg) 24.46 CubeMars-Advanced...
Open the catalog to page 8
product drawing analytical graph of motor operation specifications CubeMars-Advanced Power Pioneer Application Driving way Operation ambient temperature Winding type Insulation class Insulation High-voltage Insulation resistance Legged Robot,Exoskeleton,AGV FOC -20oC~50°C Delta H Pole pairs Reduction ratio Back drive(Nm) Temperature sensor Noise dB 65CM away the motor (Environment 45dB@1200rpm) Basic load rating (dyn. C) N Basic load ratings (stat. C0) N electric parameters Rated voltage (V) 24/48 CAN connector UART connector Power connector Inner loop encoder type Phase to Phase resistance (mQ)...
Open the catalog to page 9
product drawing analytical graph of motor operation specifications Application Driving way Operation ambient temperature Winding type Insulation class Insulation High-voltage Insulation resistance Legged Robot,Exoskeleton,AGV FOC -20oC~50°C Delta H Pole pairs Reduction ratio Back drive(Nm) Temperature sensor Noise dB 65CM away the motor (Environment 45dB@1200rpm) Basic load rating (dyn. Cr) N Basic load ratings (stat. C0r) N electric parameters Rated voltage (V) 48 Phase to Phase resistance (mQ) 170 Phase to Phase inductance (pH) 57 Mechanical time constant (ms) 0.94 Electrical time constant...
Open the catalog to page 10
product drawing analytical graph of motor operation specifications CubeMars-Advanced Power Pioneer Operation ambient temperature Winding type Insulation class Insulation High-voltage Insulation resistance Legged Robot,Exoskeleton,AGV FOC -20°050°C Delta H Pole pairs Reduction ratio Back drive(Nm) Temperature sensor Noise dB 65CM away the motor (Environment 45dB@1200rpm) Basic load rating (dyn. C) N Basic load ratings (stat. C0) N electric parameters Rated voltage (V) 24/48 CAN connector UART connector Power connector Inner loop encoder type Phase to Phase resistance (mQ) 220 Phase to Phase inductance...
Open the catalog to page 11
product drawing analytical graph of motor operation specifications Application Driving way Operation ambient temperature Winding type Insulation class Insulation High-voltage Insulation resistance Legged Robot,Exoskeleton,AGV FOC -20oC~50°C Delta H Pole pairs Reduction ratio Back drive(Nm) Temperature sensor Noise dB 65CM away the motor Basic load rating (dyn. Cr) N Basic load ratings (stat. C0r) N electric parameters Rated voltage (V) 48 Phase to Phase resistance (mQ) 170 Phase to Phase inductance (pH) 57 Mechanical time constant (ms) 0.94 Electrical time constant (ms) 0.34 Maximum torque weight...
Open the catalog to page 12
AK10-9 V2.0 KV60, 098*61,7mm product drawing analytical graph of motor operation specifications CubeMars-Advanced Power Pioneer Application Driving way Operation ambient temperature Winding type Insulation class Insulation High-voltage Insulation resistance Legged Robot,Exoskeleton,AGV FOC -20oC~50°C Star C Pole pairs Reduction ratio Back drive(Nm) Temperature sensor Noise dB 65CM away the motor (Environment 45dB@1200rpm) Basic load rating (dyn. C) N Basic load ratings (stat. C0) N electric parameters Rated voltage (V) 24/48 CAN connector UART connector Power connector Inner loop encoder type...
Open the catalog to page 13
product drawing analytical graph of motor operation specifications Application Driving way Operation ambient temperature Winding type Insulation class Insulation High-voltage Insulation resistance Legged Robot,Exoskeleton,AGV FOC -20°050°C Delta C Pole pairs Reduction ratio Back drive(Nm) Temperature sensor Noise dB 65CM away the motor (Environment 45dB@1200rpm) Basic load rating (dyn. C) N Basic load ratings (stat. C0) N electric parameters Rated voltage (V) 24/48 Phase to Phase resistance (mQ) 65.5 Phase to Phase inductance (pH) 60 Mechanical time constant (ms) 0.51 Electrical time constant...
Open the catalog to page 14All CubeMars catalogs and technical brochures
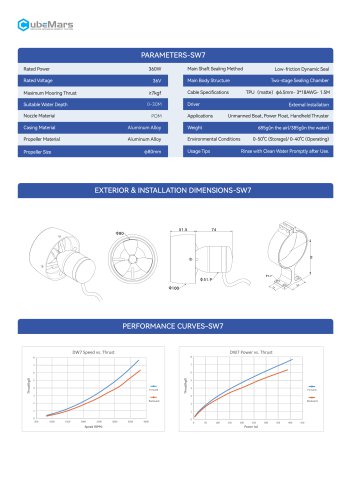 Underwater Thruster
Underwater Thruster7 Pages
 AS5084A encoder
AS5084A encoder29 Pages
Archived catalogs
 CubeMars-Catalogue new
CubeMars-Catalogue new27 Pages
 CubeMars Introduction
CubeMars Introduction20 Pages

- HS electric motor
- HS DC motor
- HS synchronous motor
- HS multipole motor
- HS gear-motor
- Data logger
- HS brushless motor
- HS 24 V motor
- HS DC gear-motor
- High-efficiency electromotor
- HS compact motor
- HS 12 V motor
- USB datalogger
- HS industrial gear-motor
- Wireless datalogger
- HS 24 V gear-motor
- HS coaxial gear-motor
- HS AC gear-motor
- HS compact gear-motor
- Solid-shaft gear-motor