- Catalogs
- Copley Controls
- XenusPLUS Compact CANopen XPC
XenusPLUS Compact CANopen XPC
1 /30Pages

XenusPLUS Compact CANopen XPC
1 /30Pages
Catalog excerpts

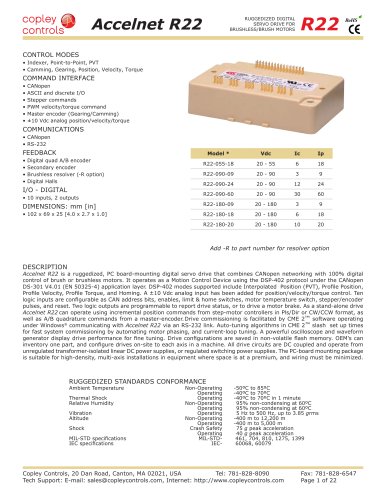
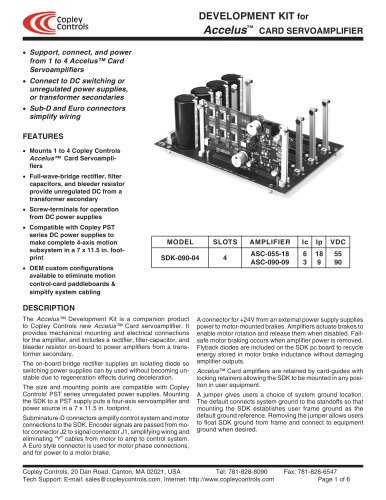
Compact CANopen digital servo drive for brush & brushless motors Control Modes • Profile Position-Velocity-Torque, Interpolated Position, Homing • Indexer, Point-to-Point, PVT • Camming, Gearing Command Interface • CANopen • ASCII and discrete I/O • Stepper commands • ±10V position/velocity/torque • PWM velocity/torque command • Master encoder (Gearing/Camming) Communications • CANopen • RS-232 Feedback Incremental • Digital quad A/B encoder • Analog sin/cos encoder • Panasonic Incremental A • Aux. encoder / encoder out Absolute • SSI • EnDat 2.1 & 2.2 • Absolute A • Tamagawa Absolute A • Panasonic Absolute A Format • Sanyo Denki Absolute A • BiSS (B&C) Other • Digital Halls I/O Digital • 6 High-speed inputs • 1 Motor over-temp input • 4 Opto-isolated inputs • 1 High-speed output • 3 Opto-isolated outputs • 1 Opto-isolated motor brake output I/O Analog • 1 Reference input, 12-bit Safe Torque Off (STO) • SIL 3, Category 3, PL d Dimensions: in [mm] • 7.54 x 4.55 x 2.13 [191.4 x 115.6 x 54.1] Add -R to the part number for resolver feedback description XPC sets new levels of performance, connectivity, and flexibility. CANopen communication provides a widely used cost-effective industrial bus. A wide range of absolute encoders are supported. Copley Controls, 20 Dan Road, Canton, MA 02021, USA P/N 16-01436 Rev 03 High resolution A/D converters ensure optimal current loop performance. Both isolated and high-speed non-isolated I/O are provided. For safety critical applications, re
Open the catalog to page 1
Compact CANopen general specifications Test conditions: Wye connected load: 2 mH line-line. Ambient temperature = 25 °C. Power input = 230 Vac, 60 Hz, 1 Ø MODEL Output CURRENT Peak Current Peak time Continuous current INPUT Adc (Arms, sinusoidal) s Adc (Arms, sinusoidal) POWER Mains voltage, phase, frequency 100~240 100~240 100~240 Vac, ±10%, 1Ø or 3Ø, 47~63 Hz 4.7 9.4 11.8 Arms 1Ø Maximum Mains Current, (Note 2) 2.6 5.2 6.5 Arms 3Ø +24 Vdc Control power +20~32 Vdc equired for operation (Note 3_ R 7.5 W (Typ, no load on +5V outputs), ≤ 18 W, (Max, both +5V outputs @ 500 mA) DIGITAL CONTROL Digital...
Open the catalog to page 2
Compact CANopen general specifications status indicators Drive Status Bicolor LED, drive status indicated by color, and blinking or non-blinking condition NET Status RUN/ERR LEDs, status of CANopen bus indicated by color and blink codes to CAN Indicator Specification 303-3 REGENERATION Operation Solid state switch drives 60 W internal regen resistor Bus Capacitance 940 µF Continuous Power Capability 20 W Cut-In Voltage +HV > 390 Vdc ±2 Vdc Regen output is on, regen resistor is dissipating energy Drop-Out Voltage +HV < 380 Vdc ±2 Vdc Regen output is off, regen resistor not dissipating energy protections...
Open the catalog to page 3
Compact CANopen general specifications feedback Incremental: Digital Incremental Encoder Quadrature signals, (A, /A, B, /B, X, /X), differential (X, /X Index signals not required) 5 MHz maximum line frequency (20 M counts/sec), MAX3097 differential line receiver 121 Ω terminators between A & /A, B & /B inputs, 130 Ω between X & /X input Analog Incremental Encoder Sin/cos format (Sin+, Sin-, Cos+, Cos-), differential, 1 Vpeak-peak ±20%, ServoTube motor compatible BW > 300 kHz, 121 Ω terminating resistors between Sin+ & Sin-, Cos+ & Cos- inputs 12-bit resolution, BW > 300 kHz, with zero-crossing...
Open the catalog to page 4
Compact CANopen canopen communications Xenus uses the CAN physical layer signals CAN_H, CAN_L, and CAN_GND for connection, and CANopen protocol for communication. Before installing the drive in a CAN system, it must be assigned a CAN address. A maximum of 127 CAN nodes are allowed on a single CAN bus. The rotary switch on the front panel controls the four lower bits of the seven-bit CAN address. When the number of nodes on a bus is less than sixteen, the CAN address can be set using only the switch. Address 0 is reserved for the CAN bus master. For installations with sixteen or more CAN nodes...
Open the catalog to page 5
Compact CANopen communications: rs-232 serial RS-232 communications XPC is configured via a three-wire, full-duplex DTE RS-232 port that operates from 9600 to 115,200 Baud, 8 bits, no parity, and one stop bit. Signal format is full-duplex, 3-wire, DTE using RxD, TxD, and Gnd. Connections to the XPC RS-232 port are through J8, an RJ-11 connector. The XPC Serial Cable Kit (SER-CK) contains a modular cable, and an adapter that connects to a 9-pin, Sub-D serial port connector (COM1, COM2, etc.) on PC’s and compatibles. SER-CK serial cable kit The SER-CK provides connectivity between a D-Sub 9 male...
Open the catalog to page 6
Compact CANopen safe torque off (sto) description The XPC provides the Safe Torque Off (STO) function as defined in IEC 61800-5-2. Three opto-couplers are provided which, when de-energized, prevent the upper and lower devices in the PWM outputs from being operated by the digital control core. This provides a positive OFF capability that cannot be overridden by the control firmware, or associated hardware components. When the opto-couplers are activated (current is flowing in the input diodes), the control core will be able to control the on/off state of the PWM outputs. installation Refer to...
Open the catalog to page 7
Compact CANopen digital command inputs: position position command inputs Digital position commands must be sourced from devices with active pullup and pull-down to take advantage of the high-speed inputs. Single-ended pulse & Direction For differential commands, the A & B channels of the multi-mode encoder ports may be used. differential pulse & Direction [IN3] Single-ended CU/CD Signal Ground Frame Ground differential CU/CD Frame Ground Signal Ground QUAD a/b ENCODER DIFFERENTIAL QUAD a/b ENCODER SINGLE-ENDED digital command inputs: velocity, torque Single-ended digital torque or velocity commands...
Open the catalog to page 8All Copley Controls catalogs and technical brochures
 XenusPLUS Compact EtherCAT XEC
XenusPLUS Compact EtherCAT XEC30 Pages
 Control Networks
Control Networks8 Pages
 R-Series Guide
R-Series Guide8 Pages
 Selection Guide
Selection Guide24 Pages
 Xenus R10
Xenus R1030 Pages
 Accelnet R23
Accelnet R2324 Pages
 Accelnet R22
Accelnet R2222 Pages
 Accelnet R21
Accelnet R2124 Pages
 Accelnet R20
Accelnet R2024 Pages
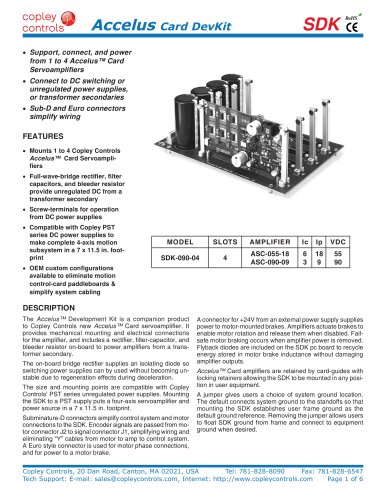 Accelus Card Development Kit
Accelus Card Development Kit6 Pages
 Accelus Card
Accelus Card8 Pages
 ASP-X2 Accelus Panel Dual
ASP-X2 Accelus Panel Dual10 Pages
 Junus
Junus10 Pages
 CAN-PCI-02
CAN-PCI-022 Pages
 CAN-IPM-01
CAN-IPM-018 Pages
 Bantam
Bantam18 Pages
 Bantam R30
Bantam R3018 Pages
 503
5036 Pages
 Power Supply Subsystem
Power Supply Subsystem8 Pages
 Shunt Regulator
Shunt Regulator2 Pages
 Xenus PLUS 2-Axis CANopen
Xenus PLUS 2-Axis CANopen34 Pages
 Xenus RoHS PLUS CANopen
Xenus RoHS PLUS CANopen28 Pages
 Xenus PLUS 2-Axis EtherCAT
Xenus PLUS 2-Axis EtherCAT34 Pages
 Xenus PLUS EtherCAT
Xenus PLUS EtherCAT28 Pages
 Xenus Edge Filter
Xenus Edge Filter16 Pages
 Regen Resistors
Regen Resistors24 Pages
 Xenus Micro
Xenus Micro24 Pages
 Accelus Card Development Kit
Accelus Card Development Kit6 Pages
 Accelus Card
Accelus Card8 Pages
 Accelus Panel
Accelus Panel10 Pages
 Xenus XTL
Xenus XTL30 Pages
 Accelnet Plus EtherCAT Panel
Accelnet Plus EtherCAT Panel18 Pages
 Accelnet Micro Module and Kit
Accelnet Micro Module and Kit24 Pages
 Accelnet Micro Panel
Accelnet Micro Panel24 Pages
 Accelnet Module Development Kit
Accelnet Module Development Kit8 Pages
 Accelnet Module
Accelnet Module14 Pages
 Accelnet Panel ADP
Accelnet Panel ADP24 Pages











- Digital I/O
- Analog I/O
- Servo-amplifier
- Motor controller
- DC servo-amplifier
- Fieldbus servo-drive
- DC motor controller
- Stepper motor controller
- AC servo-amplifier
- Communication interface card
- Brushless servo drive
- Compact servo-amplifier
- EtherCAT servo-amplifier
- Digital servo-amplifier
- Industrial interface expansion card
- CANopen servo-amplifier
- CANopen I/O
- Brushless motor control
- Digital input motor controller
- I/O card