- Catalogs
- Copley Controls
- Accelus Card
Accelus Card
1 /8Pages

Accelus Card
1 /8Pages
Catalog excerpts

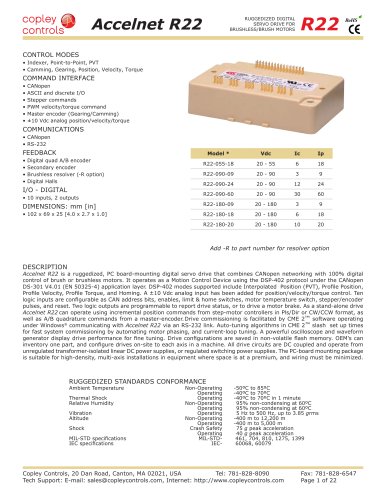
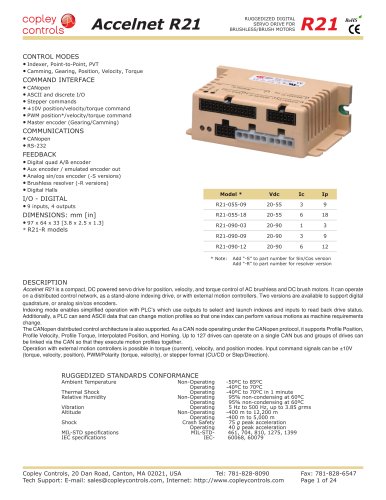
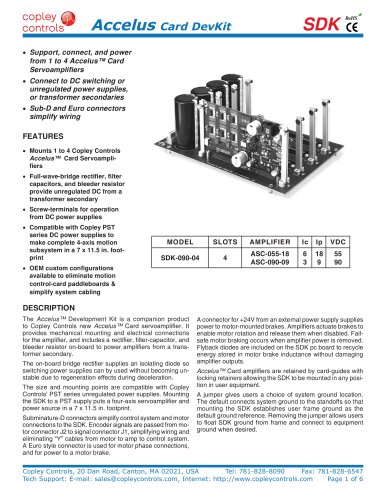
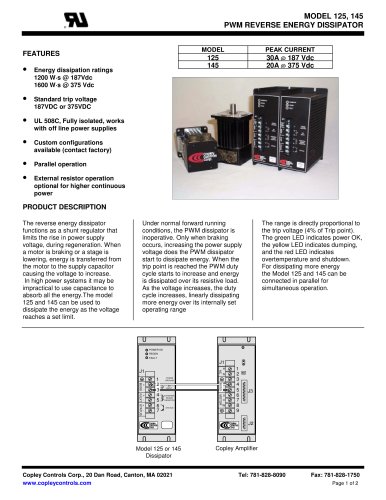
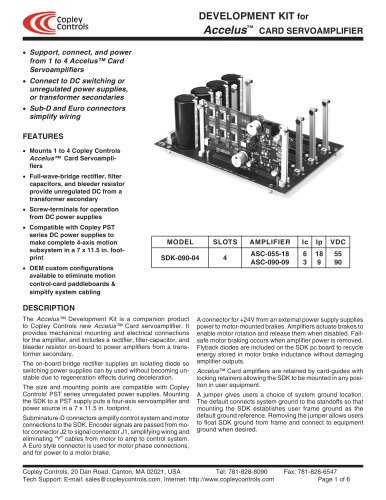
Accelus Card ASC DIGITAL SERVOAMPLIFIER for BRUSHLESS/BRUSH MOTORS RoHS • PCB Mount • Position, Velocity, and Torque Control • Controller Interface Stepper Interface ±10V Velocity / Torque Command PWM Velocity / Torque Command Electronic gearing • Field-Oriented Control for Optimal Speed / Torque • Auto-Tuning and Auto-Phasing • Feedback Digital Encoder and Halls description The Accelus™ servoamplifier drives DC brushless motors in position, velocity, or torque modes with 100% digital control. Commutation is sinusoidal using encoder feedback from the motor. Hall signals are used for phase-initialization and phase-correction eliminating motor hunting after power-up. Advanced field-oriented-control ensures the highest motor torque over a wide speed range, minimizing motor heating and maximizing efficiency. Digital control algorithms transform AC stator currents into direct and quadrature components. The torque-producing quadrature current is controlled by the current loop, and the direct component is driven to zero eliminating losses from current that doesn’t produce torque. Space-vector modulation produces higher speeds than sine-pwm modulation from the same buss voltage. CME 2™ software communicates with Accelus through an RS-232 link for complete amplifier setup. Auto-phasing and auto-tuning algorithms in CME 2™ slash set up times for fast system commissioning and eliminate “re-wire and try” so common in brushless motor installations. CME 2™ automates current loop tuning, as well as motor, Hall, and encoder phasing. A powerful oscilloscope and signal generator display amplifier performance for fine tuning thereafter. Amplifier control parameters are saved in non-volatile flash Model Ic Ip Vdc ASC-055-18 6 18 55 ASC-090-09 • Programmable I/O: 6 inputs, 2 outputs 3 9 90 memory. OEM’s can inventory one part, and configure amplifiers on-site to each axis in a machine. Accelus™ works with motion controllers that close positionloops using incremental encoder feedback and process the position error in a PID filter to produce an amplifier command for torque, force, or velocity. Only one +/-10V analog, or a one or two-wire digital PWM/(DIR) control signal is required. All commutation is done in the amplifier. In position-mode, Accelus™ accepts two-wire digital stepmotor control signals (CW/CCW, or Count/Direction), or operates as a slave from a master encoder. The ratio between input position pulses and motor position is programmable. Velocity control is derived from motor encoder signals. Velocity mode is useful not only for speed-setpoint applications, but enables operation with PLC’s or controllers that output position-error signals with no PID filtering. All amplifier circuits are DC coupled and operate from unregulated transformer-isolated DC power supplies, or regulated switching power supplies. The package is a single board with no heatplate. Solderless mating connectors on pc boards mount Accelus™ at 0° or 90°. Installation and replacement is fast and doesn’t damage amplifier connections. A Development Kit is available that mounts 1~4 Accelus™ amplifiers and provides unregulated DC power from an isolation step-down transformer. Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Tech Support: E-mail: [email protected], Web: http://www.copleycontrols.com Fax: 781-828-6547 Page 1 of 8
Open the catalog to page 1
Accelus Card DIGITAL SERVOAMPLIFIER for BRUSHLESS/BRUSH MOTORS ASC RoHS GENERAL SPECIFICATIONS Test conditions: Load = 1mH in series with 1 Ohm. Ambient temperature = 25 deg. C. MODEL OUTPUT POWER Peak Current Peak time Continuous current INPUT POWER HVmin~HVmax PWM OUTPUTS Type PWM ripple frequency COMMUTATION & CONTROL Current loop update rate Commutation Phase Initialization ASC-055-18 ASC-090-09 18 (12.73) 1 6 (4.24) 9 (6.36) 1 3 (2.12) Amps DC (Amps ACrms) Sec Amps DC (Amps ACrms) 20~90 10 3.3 VDC, Transformer-isolated ADC (1 sec) peak input current ADC continuous current 20~55 20 6.7 3-phase...
Open the catalog to page 2
Accelus COMMUNICATION Accelus™ is configured via a three-wire, full-duplex RS-232 port that operates from 9600 to 115,200 Baud. CME 2™ provides a graphic user interface (GUI) to set up all of Accelus features via a computer serial port. Connections to the Accelus™ RS-232 port P1 are via an RJ-11 style connector, and through the pc board connector J1 (J1-19 & 20). RxD, TxD, and Gnd signals comprise the signals supported. The Accelus™ Serial Cable Kit contains a modular cable, and an adapter that connects to a 9-pin, Sub-D serial port connector (COM1, COM2, etc.) on PC’s and compatibles. STATUS...
Open the catalog to page 3
Accelus Card DIGITAL SERVOAMPLIFIER for BRUSHLESS/BRUSH MOTORS DIGITAL REFERENCE INPUTS (CONT’D) For torque or velocity control, the inputs may be configured in two formats: 1. PWM (0~100%) & Polarity 2. PWM (50%) In the first case, the PWM signal can vary from 0% to 100%, and the Polarity signal is a DC level that controls the direction of the motor. The PWM duty-cycle controls the amplifier output current, or motor velocity. In current mode, 100% corresponds to the maximum output current. In velocity mode, it commands the maximum velocity that is configured. Another type of PWM input is the...
Open the catalog to page 4
Accelus the phase conductors near to each other to maximize transmission-line effects, and to reduce noise coupling into adjacent circuitry. Motor cabling should use twisted, shielded conductors for best shielding and to minimize PWM noise coupling into other circuits. The motor cable shield should connect to motor frame and the amplifier high-current ground terminal (HV return) for best results. Card DIGITAL SERVOAMPLIFIER for BRUSHLESS/BRUSH MOTORS supplies in user equipment. These power supplies should also connect to the HV Return at a single point. The final configuration should embody three...
Open the catalog to page 5
Accelus DIGITAL SERVOAMPLIFIER Card for BRUSHLESS/BRUSH MOTORS ASC RoHS AMPLIFIER CONNECTIONS 25 DAC Analog Torque or Velocity Reference Input ±10V Ref(+) Input 26 Encoder /A Neg Enable [IN4] 18 Signal Gnd 24 Signal Gnd Controller Digital I/O 15 TxD Controller RS-232 RxD I/O RxD TxD 9 2 Gnd 5 3 5 3 5 D-Sub 9-pos Female 6 Yellow 3 Hall W Fault Output [OUT2] 3 Red 2 Black V P1 6 +24V 5 1 3 5 2 4 6 Motor V 7 9 11 8 10 12 Motor U 13 15 17 14 16 Fuse 18 W Gnd 3 2 BRAKE 13 Motor W TxD HALLS W 4 /Brake Output [OUT1] Fuse V MOTOR RxD RJ-11 Modular Cable U Mount external capacitor <= 12" (30 cm) from...
Open the catalog to page 6All Copley Controls catalogs and technical brochures
 XenusPLUS Compact EtherCAT XEC
XenusPLUS Compact EtherCAT XEC30 Pages
 XenusPLUS Compact CANopen XPC
XenusPLUS Compact CANopen XPC30 Pages
 Control Networks
Control Networks8 Pages
 R-Series Guide
R-Series Guide8 Pages
 Selection Guide
Selection Guide24 Pages
 Xenus R10
Xenus R1030 Pages
 Accelnet R23
Accelnet R2324 Pages
 Accelnet R22
Accelnet R2222 Pages
 Accelnet R21
Accelnet R2124 Pages
 Accelnet R20
Accelnet R2024 Pages
 Accelus Card Development Kit
Accelus Card Development Kit6 Pages
 ASP-X2 Accelus Panel Dual
ASP-X2 Accelus Panel Dual10 Pages
 Junus
Junus10 Pages
 CAN-PCI-02
CAN-PCI-022 Pages
 CAN-IPM-01
CAN-IPM-018 Pages
 Bantam
Bantam18 Pages
 Bantam R30
Bantam R3018 Pages
 503
5036 Pages
 Power Supply Subsystem
Power Supply Subsystem8 Pages
 Shunt Regulator
Shunt Regulator2 Pages
 Xenus PLUS 2-Axis CANopen
Xenus PLUS 2-Axis CANopen34 Pages
 Xenus RoHS PLUS CANopen
Xenus RoHS PLUS CANopen28 Pages
 Xenus PLUS 2-Axis EtherCAT
Xenus PLUS 2-Axis EtherCAT34 Pages
 Xenus PLUS EtherCAT
Xenus PLUS EtherCAT28 Pages
 Xenus Edge Filter
Xenus Edge Filter16 Pages
 Regen Resistors
Regen Resistors24 Pages
 Xenus Micro
Xenus Micro24 Pages
 Accelus Card Development Kit
Accelus Card Development Kit6 Pages
 Accelus Card
Accelus Card8 Pages
 Accelus Panel
Accelus Panel10 Pages
 Xenus XTL
Xenus XTL30 Pages
 Accelnet Plus EtherCAT Panel
Accelnet Plus EtherCAT Panel18 Pages
 Accelnet Micro Module and Kit
Accelnet Micro Module and Kit24 Pages
 Accelnet Micro Panel
Accelnet Micro Panel24 Pages
 Accelnet Module Development Kit
Accelnet Module Development Kit8 Pages
 Accelnet Module
Accelnet Module14 Pages
 Accelnet Panel ADP
Accelnet Panel ADP24 Pages











- Analog I/O
- Servo-amplifier
- Motor controller
- DC servo-amplifier
- Fieldbus servo-drive
- DC motor controller
- Stepper motor controller
- AC servo-amplifier
- Communication interface card
- Brushless servo drive
- Compact servo-amplifier
- EtherCAT servo-amplifier
- Digital servo-amplifier
- Industrial interface expansion card
- CANopen servo-amplifier
- CANopen I/O
- Brushless motor control
- Digital input motor controller
- I/O card