- Catalogs
- COLOMBO FILIPPETTI
- Colombo Filippetti - Pick & Places - H..S
Colombo Filippetti - Pick & Places - H..S
1 /23Pages

Colombo Filippetti - Pick & Places - H..S
1 /23Pages
Catalog excerpts

INTERMICO manipulators of the H..S series have a gray cast iron housing. The cams operate in an oil bath. An output shaft through hole for passing services, is an option, the hole rotates. A protective device is provided to keep out water and dirt. > - compact design - high cycle speeds - short switching times - largely maintenance-free - positive locking - central through hole (on request) - low noise - various drive options - long life - no additional indexing required > These manipulators can be used wherever parts need to be moved with short switching times and smooth series of motions along...
Open the catalog to page 5
In many applications, you will find that, by using two or more arms with grippers, it is possible to load and unload simultaneously at high speed. By adding more dwell positions, it is also possible to perform other functions together with the loading and unloading operations. Fig. 2 INTERMICO manipulator as a workpiece feeder Fig. 3 INTERMICO manipulator as a transfer device Fig. 4 INTERMICO manipulator in an insertion system. It has an additional drive for the transfer movement of a conveyor belt. > 3 size="-1">
Open the catalog to page 6
In order to select the right type of INTERMICO H..S manipulator, it is not sufficient to simply calculate the mass moment of inertia and lifting load and then determine the size of the INTERMICO manipulator accordingly. In the case of cam-controlled manipulators, the ratio of the total inertial radius to the geometrical radius of the installed globoid gear is also a decisive factor. We recommend that you get our Technical Office to calculate the right type of INTERMICO manipulator for you. For this purpose, please use the questionnaire at the end of the catalog, enclosing any relevant sketches...
Open the catalog to page 7
Elastic elements must be avoided at all costs in the drive train. Use only torsionally rigid elements. Use only hardened parallel pins to connect attachment devices, e.g. grippers. Screw fittings should be secured with a screw retention fluid. Regular stopping of the INTERMICO manipulator when in motion period should be avoided to prevent damage to the device. If an inching control facility is provided for setting operations or if frequent emergency stops are likely during the movement phase, this must be taken into account in the design. > All INTERMICO manipulators are supplied without oil...
Open the catalog to page 8
H60G INTERMICO manipulators are available in the following models: GS Manipulator driven directly via cam shaft GU Manipulator with reducing gear on cam shaft GU1 Manipulator with built-in worm gear and GU2 free drive shaft GUF Manipulator with reducing gear and flange for mounting electric motors GUF1 Manipulator with built-in worm gear and GUF2 flange for mounting electric motors GM Manipulator with gear motor GM1 Manipulator with built-in worm gear and GM2 motor GB Manipulator with transmission brake motor GB1 Manipulator with built-in worm gear and GB2 brake motor > GS GUGU 1GU 2 GUFGUF 1GUF...
Open the catalog to page 9
Movement sequence A1 Movement sequence A2 360 360 0 00 0 360 360 Fig. 9 Diagram of movements Diagram of movements > A1 A2 2 - stations 3 - stations 4 - stations 2 - stations 3 - stations 4 - stations Fig. 10 Other stations on request > : In the case of A1 movement sequences (rotation in extended position), the devices are supplied with an additional slewing bearing. (See page 19 for an additional slewing bearing) > 8 size="-2">
Open the catalog to page 11
Movement sequence A1 Movement sequence A2 > 0 0360 360 0 0 360 Fig. 11 Diagram of movements Diagram of movements > In the case of A1 movement sequences (pivoting in extended position), the devices are supplied with an additional slewing bearing. (See page 19 for an additional slewing bearing) > 9 size="-1">
Open the catalog to page 12
Number Max. out p ut Pivotin g Max. out p ut Series of torque of rotation axis Series angle torque of rotation axis stations Nm ()Nm H 65 S 2 220 H 65 S90180 > Max stroke 3 220 > Max stroke 60 mm 4 220 60 mm H 80 S 2 390 H 80 S90250 > Max stroke 3 590 > Max stroke 90 mm 4 360 90 mm H 105 S 2 820 H 105 S90510 > Max stroke 3 1390 > Max stroke 120 mm 4 780 120 mm H130 S 2 1470 H 130 S901100 > Max stroke 3 2250 > Max stroke 160 mm 4 1200 160 mm >
Open the catalog to page 14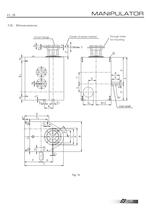
Driven flange Center of stroke markedThrough holesfor mounting >
Open the catalog to page 15
Load Load Load Load Load Load Load Load retracted extended retracted extended retracted extended retracted extended Fa ( N ) 600 750 11001400 Fr (N) 3200 10004000 900820012009200700 Mn (Nm) 100 80160 100340160380120 Mt (Nm) 180 250 5101100 >
Open the catalog to page 17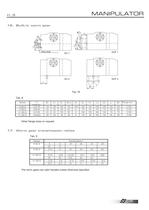
Drive shaft
Open the catalog to page 18
Series Bottom p lane after installation A B, C, D, E, F H 65 S > 6.5 7.5 H 80 S > 19.5 21 H 105 S > 32 34 H 130 S > 45 48
Open the catalog to page 21All COLOMBO FILIPPETTI catalogs and technical brochures
 SRP
SRP28 Pages
 RIGIDIAL EN
RIGIDIAL EN40 Pages
 Product Catalogue
Product Catalogue19 Pages
 RIGS04 - RIGSD6 - RIGSO0
RIGS04 - RIGSD6 - RIGSO016 Pages
 SERVO ROLLER POSITIONER
SERVO ROLLER POSITIONER12 Pages
 CF3
CF316 Pages
 H..S
H..S28 Pages
 RIGP
RIGP24 Pages
 IR1601 - IR1801 - IR2001
IR1601 - IR1801 - IR200120 Pages
 IR1001 - IR1301
IR1001 - IR130120 Pages
 RIG04 - RIG06 - RIG09
RIG04 - RIG06 - RIG0932 Pages
 INTERMITTENT MECHANISM
INTERMITTENT MECHANISM20 Pages
 Parallel oscillating drives
Parallel oscillating drives16 Pages
 Output overload clutches
Output overload clutches6 Pages








Archived catalogs
 FRET SAW MACHINES "HOBBY 50"
FRET SAW MACHINES "HOBBY 50"2 Pages














- Transport rail conveyor
- Horizontal conveyor
- Materials handling manipulator
- Chain conveyor
- Manipulator for industrial applications
- Handling manipulator
- Tool changer
- Loading manipulator
- Index unit
- Electric manipulator
- Lifting manipulator
- Rotary indexing table
- Cam indexer
- Rotary indexer
- Electric rotary indexing table
- Unloading manipulator
- Rotary manipulator
- Automatic tool changer
- Horizontal rotary indexing table