- Catalogs
- ABB Robotics
- IRB 14000
- Products
- Catalogs
- News & Trends
- Exhibitions
IRB 14000
1 /128Pages

IRB 14000
1 /128Pages
Catalog excerpts

Trace back information: Workspace 23A version a15 Checked in 2023-03-22 Skribenta version 5.5.019
Open the catalog to page 2
Product specification IRB 14000 Document ID: 3HAC052982-001 Revision: S © Copyright 2015-2023 ABB. All rights reserved. Specifications subject to change without notice.
Open the catalog to page 3
The information in this manual is subject to change without notice and should not be construed as a commitment by ABB. ABB assumes no responsibility for any errors that may appear in this manual. Except as may be expressly stated anywhere in this manual, nothing herein shall be construed as any kind of guarantee or warranty by ABB for losses, damage to persons or property, fitness for a specific purpose or the like. In no event shall ABB be liable for incidental or consequential damages arising from use of this manual and products described herein. This manual and parts thereof must not be reproduced...
Open the catalog to page 4
© Copyright 2015-2023 ABB. All rights reserved.
Open the catalog to page 5
4 Specification of variants and options 115 Product specification - IRB 14000 3HAC052982-001 Revision: S © Copyright 2015-2023 ABB. All rights reserved.
Open the catalog to page 6
Overview of this specification Overview of this specification About this product specification It describes the performance of the manipulator or a complete family of manipulators in terms of: • The structure and dimensional prints • The fulfilment of standards, safety and operating requirements • The load diagrams, mounting of extra equipment, the motion and the robot reach • The specification of variants and options available The product specification also contains information for the controller. Product specifications are used to find data and performance about the product, for example to...
Open the catalog to page 7
© Copyright 2015-2023 ABB. All rights reserved.
Open the catalog to page 9
This page is intentionally left blank
Open the catalog to page 10
1 Description 1.1.1 Introduction to structure 1 Description 1.1 Structure 1.1.1 Introduction to structure General The IRB 14000 is ABB Robotics first generation dual arms robot with 7-axis each arm, industrial robot, designed specifically for manufacturing industries that use flexible robot-based automation, e.g. 3C industry. The robot has an open structure that is especially adapted for flexible use, and can communicate extensively with external systems. Continues on next page Product specification - IRB 14000 3HAC052982-001 Revision: S © Copyright 2015-2023 ABB. All rights reserved.
Open the catalog to page 11
1.1.1.1.1 Robot type description 1.1.1.1 Robot description 1.1.1.1.1 Robot type description Type A of IRB 14000 The difference between IRB 14000 and IRB 14000 Type A is that the Type A has a reinforced design on the arm. As a result of this, the following parts differ between types: • Motor brake, axis 1 and axis 2 • Gearbox, axis 4 and axis 5 • Mechanical design, axis 4 and axis 5 • Cable harness design Those robots in original design are simply named IRB 14000 (no-type-specified). How to know which type the robot is? The following characteristics can be used to figure out the robot type. Axis...
Open the catalog to page 12
Robot dimension 1.1.1.1.1 Robot type description Continued Continues on next page Product specification - IRB 14000 13 © Copyright 2015-2023 ABB. All rights reserved.
Open the catalog to page 13
1.1.1.1.1 Robot type description Continued Arm configuration during system installation The robot type must be correctly selected when setting the arm configuration during system installation, otherwise, unexpected motion error or performance issues may occur. Type A is available for selection as below only in RobotStudio 2019.5.3 or later and RobotWare 6.10.2 or later. a IRB 14000 (Dual arm YuMi) * 0 IRB 14000-0.5/0.5 a Left Arm configuration □ IRB 14000-0.5/0.5 0 IR8 14000-0.5/0.5 Type A * Right Arm configuration □ IRB 14000-0.5/0.5 0 IRB -4000;0.5/0.5 Type A j xx2000002171 Clean room classification...
Open the catalog to page 14
1.1.1.1.1 Robot type description Continued When operated under the specified test conditions, the IRB 14000 YuMi including gripper and suction cup is suitable for use in cleanrooms fulfilling the specifications of the following Air Cleanliness Classes according to ISO 14644-1. Protection The robot has IP30 protection. Operating system The robot is equipped with the controller (located inside the boby of the robot) and robot control software, RobotWare. RobotWare supports every aspect of the robot system, such as motion control, development and execution of application programs, communication...
Open the catalog to page 15
1 Description 1.1.1.1.1 Robot type description Continued Product specification - IRB 14000 3HAC052982-001 Revision: S © Copyright 2015-2023 ABB. All rights reserved.
Open the catalog to page 16
The IRB14000 can only be mounted on table or other flat surface, no other mounting position is permitted. © Copyright 2015-2023 ABB. All rights reserved.
Open the catalog to page 17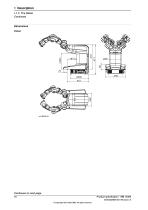
Continues on next page 18 Product specification - IRB 14000 © Copyright 2015-2023 ABB. All rights reserved.
Open the catalog to page 18
© Copyright 2015-2023 ABB. All rights reserved.
Open the catalog to page 19
The listed standards are valid at the time of the release of this document. Phased out or replaced standards are removed from the list when needed. General The product is designed in accordance with IS0 10218-1:2011, Robots for industrial environments - Safety requirements -Part 1 Robots, and applicable parts in the normative references, as referred to from ISO 10218-1:2011. In case of deviations from ISO 10218-1:2011, these are listed in the declaration of incorporation which is part of the product delivery. Normative standards as referred to from ISO 10218-1 Continues on next page © Copyright...
Open the catalog to page 20
1.2.1 Applicable standards Continued © Copyright 2015-2023 ABB. All rights reserved.
Open the catalog to page 21
1.2.1 Applicable standards Continued Standard i Only valid for arc welding robots. Replaces IEC 61000-6-4 for arc welding robots. ii Only robots with protection Clean Room. Product specification - IRB 14000 3HAC052982-001 Revision: S © Copyright 2015-2023 ABB. All rights reserved.
Open the catalog to page 22
Functional safety The following safety functions are inherent design measures in the control system, contributing to power and force limiting. They are certified to category B, performance level b, according to EN ISO 13849-1. © Copyright 2015-2023 ABB. All rights reserved.
Open the catalog to page 23All ABB Robotics catalogs and technical brochures
 AMR P304
AMR P3042 Pages
 IRB 6700
IRB 6700176 Pages
 IRB 4600
IRB 46002 Pages
 IRB 4600
IRB 460086 Pages
 IRB 910INV
IRB 910INV90 Pages
 IRB 460
IRB 4602 Pages
 IRB 2400
IRB 240060 Pages
 IRB 1600/1660
IRB 1600/166088 Pages
 IRB 1410 Industrial Robot
IRB 1410 Industrial Robot48 Pages
 MU series
MU series2 Pages
 IRB 5500-22/23
IRB 5500-22/234 Pages
 IRB 52
IRB 522 Pages
 IRB 910SC series
IRB 910SC series58 Pages
 IRB910SC
IRB910SC56 Pages
 Robotics product range
Robotics product range35 Pages
 Press Automation Solutions
Press Automation Solutions28 Pages
 IRBT 4004/6004/7004
IRBT 4004/6004/70042 Pages
 IRB 1100
IRB 110020 Pages
 ABB create
ABB create24 Pages
 LIVING LEVELS
LIVING LEVELS44 Pages
 IRB 6660 - Industrial Robot
IRB 6660 - Industrial Robot4 Pages
 IRB 120 industrial robot
IRB 120 industrial robot2 Pages
 Function Package IRB 4400
Function Package IRB 44002 Pages
 PalletPack 460
PalletPack 4602 Pages
 Atomizer Upgrades
Atomizer Upgrades2 Pages
 RacerPack
RacerPack13 Pages
 RB 910SC SCARA Overview
RB 910SC SCARA Overview38 Pages
 IRB 6660FX
IRB 6660FX2 Pages
 IRB 1660ID
IRB 1660ID17 Pages
 A50-0406-1660
A50-0406-1660149 Pages
 IRB 1660ID
IRB 1660ID2 Pages
 IRBP L Workpiece positioner
IRBP L Workpiece positioner2 Pages
 FlexTrack IRT 501
FlexTrack IRT 5012 Pages
 IRBT X004 Track Motion
IRBT X004 Track Motion2 Pages
 ROB0245EN RacerPack
ROB0245EN RacerPack2 Pages
 IntegratedFC_ROB0243EN
IntegratedFC_ROB0243EN2 Pages
 IRL 600 Flexlifter 600
IRL 600 Flexlifter 6002 Pages
 FlexLifter IRL100 IRL190
FlexLifter IRL100 IRL1902 Pages
 FlexGun
FlexGun2 Pages
 RobotStudio Cutting PowerPac
RobotStudio Cutting PowerPac2 Pages
 Laser Cutting Software
Laser Cutting Software4 Pages
 TSC
TSC2 Pages
 7th axis
7th axis2 Pages
 2K Mixer
2K Mixer2 Pages
 FlexPLP IRPLP
FlexPLP IRPLP2 Pages
 IRB 8700
IRB 87002 Pages
 YuMi®
YuMi®4 Pages
 IRBP i-L/ i-T/ i-A
IRBP i-L/ i-T/ i-A2 Pages
 IRBT 15_16_26
IRBT 15_16_262 Pages
 ABB Laser Cutsheet_IRBP K
ABB Laser Cutsheet_IRBP K2 Pages
 ABB Laser Cutsheet_IRBP R
ABB Laser Cutsheet_IRBP R2 Pages
 RobotWare Cutting
RobotWare Cutting2 Pages
 IRB 7600 - the Power Robot
IRB 7600 - the Power Robot20 Pages
 IRB 140 Industrial Robot
IRB 140 Industrial Robot2 Pages





















- Electromotor
- Welding system
- Alternating current motor
- Automation software solution
- Asynchronous motor
- Automatic welding machine
- Process software
- Lifting table
- Computer-aided design software
- ABB articulated robot
- Calibration system
- Scissor lift table
- ABB 6-axis robot
- Feeder
- ABB floor-mounted robot
- 3D software solution
- ABB handling robot
- Pneumatic gripper