カタログの抜粋

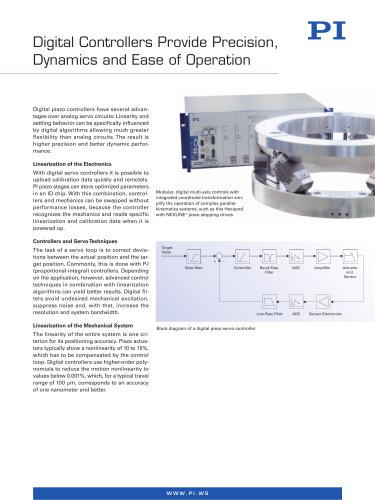
Parallel Kinematics Optimizes Motion in Multiple Axes In a parallel-kinematic multi-axis system, all actuators act directly on one moving platform. This means that all axes move the same minimized mass and can be designed with identical dynamic properties. Parallel-kinematic systems have additional advantages over serially stacked or nested systems, including more-compact construction and no cumulative error or weight from the different axes. Parallel-kinematic systems can be operated with up to six degrees of freedom with low inertia and excellent dynamic performance. In a parallel-kinematic structure, all drives act on the same moving platform so that the individual axes have the same dynamic behavior. Consequently, higher dynamics and higher scanning frequencies, improved guiding accuracy, repeatability and stability can be achieved than with serial axes systems A serial multi-axis system, whether nested or stacked, assigns exactly one direction of motion to each actuator and each sensor. The stage axes carry the next mounted axis so that the dynamic properties deteriorate and the overall stiffness decreases. Moreover, the runouts of the individual axes add up to a lower accuracy and repeatability. Serial-kinematic systems have a simpler structure and can often be manufactured at lower costs
カタログの1ページ目を開く
Headquarters GERMANY_ © Physik Instrumente (PI) GmbH & Co. KG All contents, including texts, graphics, data etc., as well as their layout, are subject to copyright and other protective laws. Any copying, modification or redistribution in whole or in parts is subject to a written permission of PI. Although the information in this document has been compiled with the greatest care, errors cannot be ruled out completely. Therefore, we cannot guarantee for the information being complete, correct and up to date. Illustrations may differ from the original and are not binding. PI reserves the right...
カタログの2ページ目を開くPhysik Instrumenteのすべてのカタログと技術パンフレット
-
 A-143
A-1435 ページ
-
 A-811.CE
A-811.CE3 ページ
-
 G-902.RxI
G-902.RxI5 ページ
-
 P-405
P-4054 ページ
-
 PRYY
PRYY7 ページ
-
 A-523
A-5235 ページ
-
 L-812
L-81218 ページ
-
 RS-40 V7
RS-40 V74 ページ
-
 A-68x
A-68x4 ページ
-
 G-901
G-9019 ページ
-
 G-910.RC02
G-910.RC026 ページ
-
 F-712.IRP
F-712.IRP6 ページ
-
 G-910.RC01 • RC03
G-910.RC01 • RC034 ページ
-
 C-663.12
C-663.123 ページ
-
 C-887.53x
C-887.53x5 ページ
-
 Piezoelectric Discs
Piezoelectric Discs7 ページ
-
 L-402
L-4025 ページ
-
 P-840
P-8404 ページ
-
 M-238
M-2385 ページ
-
 L-220
L-2205 ページ
-
 P-725
P-7259 ページ
-
 C-413
C-4133 ページ
-
 PL112 – PL140
PL112 – PL1404 ページ
-
 U-628
U-6283 ページ
-
 P-545.3D8S
P-545.3D8S5 ページ
-
 P-611.XZ • P-611.2
P-611.XZ • P-611.24 ページ
-
 P-541.2 • P-542.2
P-541.2 • P-542.25 ページ
-
 Engineered Systems
Engineered Systems8 ページ
-
 Drivetrain Elements
Drivetrain Elements4 ページ
-
 Motors and Drives
Motors and Drives3 ページ
-
 Hexapod Positioning Systems
Hexapod Positioning Systems133 ページ
-
 Q-Motion® SpaceFAB
Q-Motion® SpaceFAB4 ページ
-
 A-131
A-1315 ページ
-
 d-891
d-8911 ページ
-
 PI Datasheet V-275
PI Datasheet V-2755 ページ
-
 PI Datasheet V-273
PI Datasheet V-2735 ページ
-
 PI Datasheet VT-80
PI Datasheet VT-803 ページ
-
 A-65x
A-65x4 ページ
-
 A-60x.MTT
A-60x.MTT1 ページ
-
 A-80x
A-80x3 ページ
-
 A-322
A-3223 ページ
-
 A-110
A-1103 ページ
-
 A-141
A-1413 ページ
-
 A-123
A-1235 ページ
-
 A-121
A-1215 ページ
-
 DT-34
DT-344 ページ
-
 A-10x
A-10x3 ページ
-
 New Products 2015
New Products 201548 ページ
-
 PI Electron Microscopy
PI Electron Microscopy16 ページ
-
 Piezo Motors and Stages
Piezo Motors and Stages48 ページ
-
 PI Product Overview
PI Product Overview34 ページ
-
 Piezoelectric Actuators
Piezoelectric Actuators74 ページ
-
 Hexapods 6-Axis Stages
Hexapods 6-Axis Stages56 ページ