
カタログの抜粋

MICROSTEPPING DRIVER MAIN FEATURES: • Current: 0.35 to 2.0 Amps Peak • Step resolution: Full Step, 2x, 4x, 8x, 2 wires with • Speed: (step frequency: 25 kHz) • Inputs: Step Clock, Direction, Disable/Enable • Inputs: Step Clock, Direction, Disable/Enable • Inputs: Step Clock, Direction, Disable/Enable A DB-9 female connector cable receives power and provides the control connections for the R208 Driver. Active signals are optically isolated. An open-collector drive is required to provide pulses for Step, levels for Direction and Disable/Enable. Each R208 comes with a DB-9 connector with flying leads, and a 4 pin connector with flying • 090-00019 DB-9 cable (comes with unit) • 090-00018 motor cable (comes with unit) • Also Requires (not included): PC, step motor, function or pulse generator, controller • Connect the power supply and use a voltmeter to read from pin 7 to the potentiometer in the R208 Rotate potentiometer (CW will decrease current, CCW will increase current) Voltmeter should read the following: Voltage Vref = (I - 0.14)/1.554, where I is desired current in Amps/Phase, and this formula accounts for multiplying 1.4 times to get peak current. Example: if motor is rated at 0.8 Amps/Phase, CHANGING STEP RESOLUTION: Pins 2 and 3 are used to change microstepping. When one pin, both or no pins are connected to Pin 7, this will change the step resolution accordingly: are used to preset the step contact closure to ground
カタログの1ページ目を開く
Key selling features: • Extremely Low Cost • Compact Size • Low Power Dissipation • Higher Torque DETAILED FEATURES: • Operating temperature: -20 to 50 °C • Humidity range: 0 to 95% (non-condensing) • Step pulse timing: • Minimum step pulse width: 20 microseconds (20x10-6) • Minimum step low time: 20 microseconds • Maximum power-down recovery time 20 milliseconds • Max step frequency = 1 / [min. step pulse width + min. step low time] = 25 kHz • More efficient and better torque output: Torque Comparison 1.8˚ Step Motor, 24vDC, 1.4 Amp/Phase, 1/8 Stepping 40 R208 Competitor A Competitor B...
カタログの2ページ目を開く
COMMON TECH SUPPORT QUESTIONS / RMA ISSUES: BURNED OR BLOWN DRIVER (LOW INDUCTANCE): Motors with inductance levels of 1.5 mH or less will cause the drivers to blow or not work as expected. Torque will drop because the output current is less than expected. (A limitation of the driver chip) Check holding current and running current. It could be too high. Check wiring. Motor phases could be crossed (A is in B or B Bar, etc) Check connection between motor and drive. If, for example, the "A" and "A Bar" connection is actually connected to an "A" phase wire and a "B" phase wire, then the driver...
カタログの3ページ目を開くLin Engineeringのすべてのカタログと技術パンフレット
-
 SilverPak 17D Plus
SilverPak 17D Plus1 ページ
-
 5818 ?Super Torque
5818 ?Super Torque1 ページ
-
 208 ? Standard Motor
208 ? Standard Motor1 ページ
-
 High Torque
High Torque1 ページ
-
 Why Lin 2014
Why Lin 20142 ページ
-
 MICROSTEPPING DRIVER
MICROSTEPPING DRIVER2 ページ
-
 8618 STANDARD MOTOR
8618 STANDARD MOTOR1 ページ
-
 5618 STANDARD MOTOR
5618 STANDARD MOTOR1 ページ
-
 5609 STANDARD MOTOR
5609 STANDARD MOTOR1 ページ
-
 4018 STANDARD MOTOR
4018 STANDARD MOTOR1 ページ
-
 4109 GOLD LINE MOTOR
4109 GOLD LINE MOTOR1 ページ
-
 3518 STANDARD MOTOR
3518 STANDARD MOTOR1 ページ
-
 211 COMPACT MOTOR
211 COMPACT MOTOR1 ページ
-
 208 COMPACT MOTOR
208 COMPACT MOTOR1 ページ
-
 SilverPak 17C/CE
SilverPak 17C/CE2 ページ
-
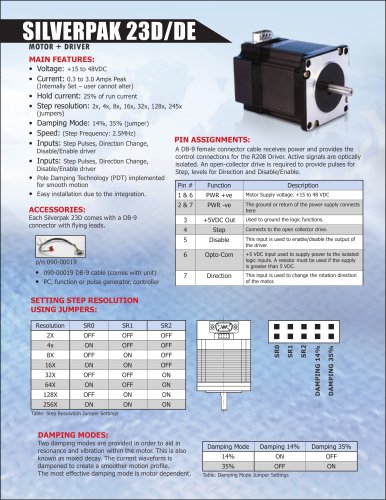 SILVERPAK 23D/DE
SILVERPAK 23D/DE3 ページ
-
 SilverPak 23C
SilverPak 23C2 ページ
-
 GOLD LINE MOTOR
GOLD LINE MOTOR2 ページ
-
 1.8° SIZE 11
1.8° SIZE 112 ページ
-
 STANDARD MOTOR
STANDARD MOTOR2 ページ
-
 SilverPak 17T
SilverPak 17T3 ページ
-
 1.8º SIZE 14
1.8º SIZE 142 ページ
-
 Lin Catalog 2006
Lin Catalog 2006100 ページ

















カタログアーカイブ
-
 STANDARD MOTOR 5609
STANDARD MOTOR 56092 ページ
-
 STANDARD MOTOR 4018
STANDARD MOTOR 40182 ページ
-
 STANDARD MOTOR 8618
STANDARD MOTOR 86182 ページ



