- Catalogs
- Copley Controls
- Accelnet Module Development Kit
Accelnet Module Development Kit
1 /8Pages

Accelnet Module Development Kit
1 /8Pages
Catalog excerpts

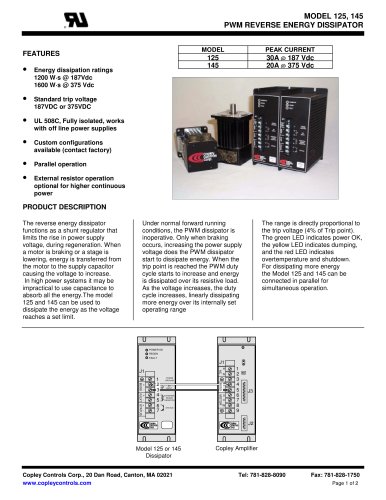
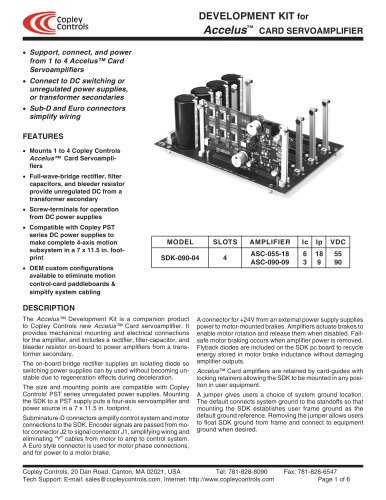
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 Tech Support: E-mail: [email protected], Internet: http://www.copleycontrols.com Page 1 of 8 Accelnet Module ™ DEVELOPMENT KIT FEATURES • Works with all Accelnet Models • Develop & Debug Accelnet projects then transfer design to oem pc board. A 16-position rotary switch connects to Accelnet I/O pins for selection of the CANopen device address. Individual toggle switches are wired to other I/O pins to simulate limit, capture, and home switch functions. Jumpers permit these switches to be disconnected so that the I/O pins can connect to user equipment through the Sub-D connectors. Across-the-line encoder termination resistors can be switched in or out via another set of jumpers giving a 121Ù terminating impedance when high speed encoder signals could be susceptible to noise if wires were left open-circuit and subject to ringing. Another 121Ù resistor can be jumpered in or out as a terminator for the CAN bus signals if the development kit is the last device on a CANopen network. • Provides Mounting & Connections for Accelnet CANopen Servoamplifiers DESCRIPTION The Development Kit is a companion product to Copley Controls’ new Accelnet modular servoamplifiers. It provides mechanical mounting and electrical connections for the amplifier so users can quickly connect Accelnet and begin to develop applications. Euro style screw-terminal connector blocks simplify connections for power and motor phase-windings. Sub-D connectors use same pinouts as Accelus™ Panel amplifiers and carry motor encoder and Hall signals, and I/O signals. A connector is provided for +24V from an external power supply to power Accelnet as an auxiliary power supply. This enables Accelnet to “stay-alive” to monitor motor position and report back to the controller via the CANopen bus while +HV is removed for an E-stop condition. MODEL AMPLIFIER Ic Ip VDC MDK-180-01 ACM-055-18 ACM-090-09 ACM-180-09 ACM-180-18 ACM-180-20 6 3 3 6 10 18 9 9 18 20 55 90 180 180 180 Two led’s can be jumpered in or out to the Accelnet Out1 or Out2 pins. These give an easy read-out of the output status for debugging. Motor encoder signals are connected through from the motor connector to the signal connector eliminating split cables in cases where the Accelnet is operating in stand-alone mode as a torque amplifier. In these cases, the controller uses the encoder for position feedback, and Accelnet operates as a torque or force amplifier.
Open the catalog to page 1
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 Tech Support: E-mail: [email protected], Internet: http://www.copleycontrols.com Page 2 of 8 Accelnet Module ™ DEVELOPMENT KIT CAN ADDRESS SELECTION Rotary switch SW6, labeled “CAN ADDR” connects to logic inputs 7, 8, 9, and 10 of the amplifier. These are programmable inputs which default to CAN address bits. The switch will select CAN addresses 0x00 through 0x0F (0~15 decimal). Address 0x00 is reserved for network management devices so amplifiers should use addresses 0x01~0x0F. The CAN standard permits...
Open the catalog to page 2
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 Tech Support: E-mail: [email protected], Internet: http://www.copleycontrols.com Page 3 of 8 Accelnet Module ™ DEVELOPMENT KIT Logic Input Default Function Switch Connection External Connection IN01 Enable SW1 JP2-A J3-5 JP3-A IN02 Fwd Enable SW2 JP2-B J3-17 JP3-B IN03 Rev Enable SW3 JP2-C J3-18 JP3-C IN04 Home SW4 JP2-D J3-4 JP3-D IN06 Capture SW5 JP2-E J3-3 JP3-E LOGIC OUTPUTS Accelnet has two logic outputs that can drive controller logic inputs or relays. If relays are driven, then flyback diodes...
Open the catalog to page 3
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 Tech Support: E-mail: [email protected], Internet: http://www.copleycontrols.com Page 4 of 8 Accelnet Module ™ DEVELOPMENT KIT ENCODER CONNECTIONS The development kit has 10 kÙ pull-up resistors on the A,B, and X encoder signal inputs (J2-8, 7, 6). There are no pullup resistors on the /A, /B, and /X inputs (J2-15,14,13). Jumpers JP1-A,B,C connect 121 Ù terminating resistors between the A-/A, B-/B, and X-/X signal pairs for use with differential-output encoders. If single-ended encoders are used, these...
Open the catalog to page 4
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 Tech Support: E-mail: [email protected], Internet: http://www.copleycontrols.com Page 5 of 8 Accelnet Module ™ DEVELOPMENT KIT CONNECTIONS Accelus Serial Cable Kit DC Power + - 5 4 J1 J3 9 /Motemp [IN5] Gnd 5 11 +5 V Output Hall W 4 Hall V 3 13 6 14 7 15 6 /Brake [OUT2] Gnd 10 W V U Motor W Motor V Motor U BRAKE +24V HALLS U V W ENCODER B /B X /X MOTOR +5 & Gnd for Encoder + Hall 15 Signal Gnd 24 16 Signal Gnd 25 11 J4 5 2 4 3 RxD TxD Gnd RJ-11 6 1 5 RS-232 signals connect to both J3 & J4. Only one...
Open the catalog to page 5
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 Tech Support: E-mail: [email protected], Internet: http://www.copleycontrols.com Page 6 of 8 Accelnet Module ™ DEVELOPMENT KIT CONNECTOR LAYOUT J1 SIGNAL PIN +HV Input 5 GND 4 Motor W Output 3 Motor V Output 2 Motor U Output 1 J8 SIGNAL PIN +5V Input 4 Gnd 3 Gnd 2 Aux HV Input 1 PIN J2 SIGNAL 8 Encoder A Input 7 Encoder B Input 6 Encoder X Input 5 Signal Ground 4 Hall W Input 3 Hall V Input 2 Hall U Input 1 Chassis Ground J2 SIGNAL PIN Encoder /A Input 15 Encoder /B Input 14 Encoder /X Input 13 Signal...
Open the catalog to page 6
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547 Tech Support: E-mail: [email protected], Internet: http://www.copleycontrols.com Page 7 of 8 Accelnet Module ™ DEVELOPMENT KIT J3 SIGNAL PIN Chassis Ground 1 No Connection 2 Capture [IN6] 3 Home [IN4] 4 Enable Input [IN1] 5 Brake Output [OUT2] 6 Encoder X Output 7 Encoder B Output 8 Encoder A Output 9 Signal Ground 10 Fault Output [OUT1] 11 Signal Ground 12 Signal Ground 13 PIN J3 SIGNAL 14 No Connection 15 Signal Ground 16 Signal Ground 17 [IN2] Forward Enable Input 18 [IN3] Reverse Enable Input 19...
Open the catalog to page 7All Copley Controls catalogs and technical brochures
 XenusPLUS Compact EtherCAT XEC
XenusPLUS Compact EtherCAT XEC30 Pages
 XenusPLUS Compact CANopen XPC
XenusPLUS Compact CANopen XPC30 Pages
 Control Networks
Control Networks8 Pages
 R-Series Guide
R-Series Guide8 Pages
 Selection Guide
Selection Guide24 Pages
 Xenus R10
Xenus R1030 Pages
 Accelnet R23
Accelnet R2324 Pages
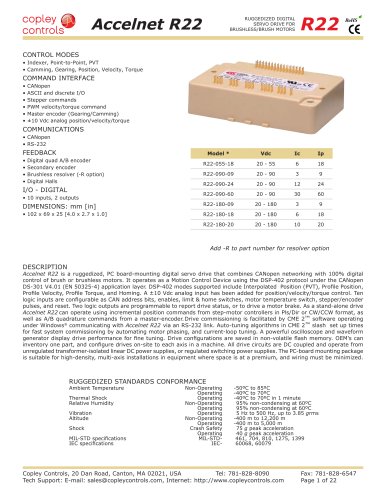 Accelnet R22
Accelnet R2222 Pages
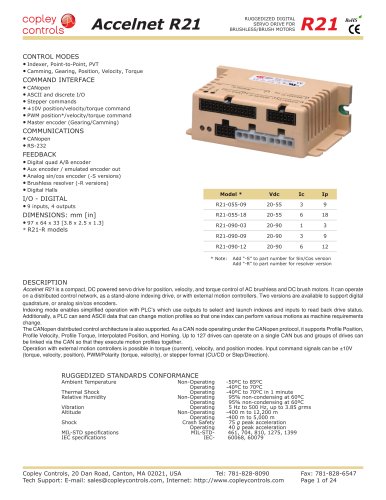 Accelnet R21
Accelnet R2124 Pages
 Accelnet R20
Accelnet R2024 Pages
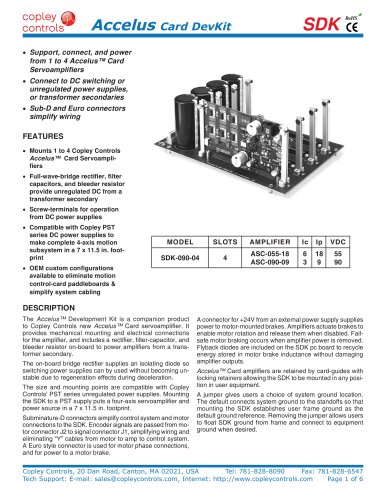 Accelus Card Development Kit
Accelus Card Development Kit6 Pages
 Accelus Card
Accelus Card8 Pages
 ASP-X2 Accelus Panel Dual
ASP-X2 Accelus Panel Dual10 Pages
 Junus
Junus10 Pages
 CAN-PCI-02
CAN-PCI-022 Pages
 CAN-IPM-01
CAN-IPM-018 Pages
 Bantam
Bantam18 Pages
 Bantam R30
Bantam R3018 Pages
 503
5036 Pages
 Power Supply Subsystem
Power Supply Subsystem8 Pages
 Shunt Regulator
Shunt Regulator2 Pages
 Xenus PLUS 2-Axis CANopen
Xenus PLUS 2-Axis CANopen34 Pages
 Xenus RoHS PLUS CANopen
Xenus RoHS PLUS CANopen28 Pages
 Xenus PLUS 2-Axis EtherCAT
Xenus PLUS 2-Axis EtherCAT34 Pages
 Xenus PLUS EtherCAT
Xenus PLUS EtherCAT28 Pages
 Xenus Edge Filter
Xenus Edge Filter16 Pages
 Regen Resistors
Regen Resistors24 Pages
 Xenus Micro
Xenus Micro24 Pages
 Accelus Card Development Kit
Accelus Card Development Kit6 Pages
 Accelus Card
Accelus Card8 Pages
 Accelus Panel
Accelus Panel10 Pages
 Xenus XTL
Xenus XTL30 Pages
 Accelnet Plus EtherCAT Panel
Accelnet Plus EtherCAT Panel18 Pages
 Accelnet Micro Module and Kit
Accelnet Micro Module and Kit24 Pages
 Accelnet Micro Panel
Accelnet Micro Panel24 Pages
 Accelnet Module
Accelnet Module14 Pages
 Accelnet Panel ADP
Accelnet Panel ADP24 Pages











- Digital I/O
- Analog I/O
- Servo-amplifier
- Motor controller
- DC servo-amplifier
- Fieldbus servo-drive
- DC motor controller
- Brushless servo drive
- Stepper motor controller
- AC servo-amplifier
- Communication interface card
- EtherCAT servo-amplifier
- Compact servo-amplifier
- CANopen servo-amplifier
- Industrial interface expansion card
- Digital servo-amplifier
- CANopen I/O
- Stepper servo drive
- Brushless motor control
- I/O card